Projektiver Kegelschnitt
Ein nicht ausgearteter (n.a.) projektiver Kegelschnitt ist eine Kurve
in einer pappusschen
projektiven Ebene, die bei geeigneter Wahl einer Ferngerade  affin als Hyperbel
affin als Hyperbel
 (s. Bild: c2) oder Parabel
(s. Bild: c2) oder Parabel
 (Bild: c1) beschrieben werden kann. Die Gleichung
(Bild: c1) beschrieben werden kann. Die Gleichung  beschreibt nicht immer einen n.a. Kegelschnitt.
beschreibt nicht immer einen n.a. Kegelschnitt.
- Ein n.a. Kegelschnitt lässt sich in homogenen Koordinaten (s. u.) durch
eine Gleichung der Form
 beschreiben und ist deswegen auch eine projektive
Quadrik.
beschreiben und ist deswegen auch eine projektive
Quadrik.
Geometrisch kann man sich einen n.a. projektiven Kegelschnitt  kreisähnlich vorstellen mit den wesentlichen Eigenschaften: 1) eine Gerade
trifft
in 0, 1 oder 2 Punkten, 2) in jedem Punkt
kreisähnlich vorstellen mit den wesentlichen Eigenschaften: 1) eine Gerade
trifft
in 0, 1 oder 2 Punkten, 2) in jedem Punkt  von
gibt es genau eine Tangente
von
gibt es genau eine Tangente  ,
d. h.
,
d. h.  .
Diese beiden Eigenschaften bestimmen allerdings noch nicht einen n.a.
Kegelschnitt. Zusätzlich zu den geometrischen Eigenschaften 1), 2) besitzt ein
n.a. Kegelschnitt viele Symmetrien (s. u.).
.
Diese beiden Eigenschaften bestimmen allerdings noch nicht einen n.a.
Kegelschnitt. Zusätzlich zu den geometrischen Eigenschaften 1), 2) besitzt ein
n.a. Kegelschnitt viele Symmetrien (s. u.).
Der Vorteil eines projektiven n.a. Kegelschnitts ist die Tatsache, dass alle
n.a. projektiven Kegelschnitte zur Kurve mit der Gleichung  projektiv äquivalent sind. Affin sind die affinen Kegelschnitte Ellipse,
Parabel und Hyperbel nicht äquivalent: Eine Parabel lässt sich mit einer affinen
Abbildung nicht in eine Ellipse oder Hyperbel überführen.
projektiv äquivalent sind. Affin sind die affinen Kegelschnitte Ellipse,
Parabel und Hyperbel nicht äquivalent: Eine Parabel lässt sich mit einer affinen
Abbildung nicht in eine Ellipse oder Hyperbel überführen.
Projektive Ebene über einem Körper K
Die projektive Erweiterung der affinen Ebene über einem Körper K
liefert das anschauliche inhomogene Modell der projektiven Ebene über K. Dabei
wird jeder Gerade  bzw.
bzw.  ein Punkt, der allen dazu parallelen Geraden auch angehört, hinzugefügt. Die
neuen Punkte nennt man Fernpunkte und die Menge der neuen Punkte
Ferngerade. In der projektiven Erweiterung gibt es die Parallelrelation
zwischen Geraden nicht mehr. Die Geometrie ist „einfacher“ geworden: 1) Zu je
zwei Punkten gibt es genau eine Verbindungsgerade.
2) Zwei Geraden schneiden sich in genau einem Punkt. Die zunächst inhomogene
Beschreibung (d.h. die Ferngerade scheint eine Sonderrolle zu spielen)
wird durch das homogene Modell beseitigt: Ein Punkt ist eine Ursprungsgerade,
eine Gerade eine Ursprungsebene im
ein Punkt, der allen dazu parallelen Geraden auch angehört, hinzugefügt. Die
neuen Punkte nennt man Fernpunkte und die Menge der neuen Punkte
Ferngerade. In der projektiven Erweiterung gibt es die Parallelrelation
zwischen Geraden nicht mehr. Die Geometrie ist „einfacher“ geworden: 1) Zu je
zwei Punkten gibt es genau eine Verbindungsgerade.
2) Zwei Geraden schneiden sich in genau einem Punkt. Die zunächst inhomogene
Beschreibung (d.h. die Ferngerade scheint eine Sonderrolle zu spielen)
wird durch das homogene Modell beseitigt: Ein Punkt ist eine Ursprungsgerade,
eine Gerade eine Ursprungsebene im  .
Der Vorteil des homogenen Modells ist: Die wichtigsten Kollineationen werden
durch lineare Abbildungen induziert.
.
Der Vorteil des homogenen Modells ist: Die wichtigsten Kollineationen werden
durch lineare Abbildungen induziert.
Definition: Es sei K ein Körper und
 die Menge der Punkte
die Menge der Punkte
-

 die Menge der Geraden,
die Menge der Geraden,
 die Ferngerade, ihre Punkte sind die Fernpunkte.
die Ferngerade, ihre Punkte sind die Fernpunkte.
 heißt inhomogenes Modell der projektiven Ebene über dem Körper K.
heißt inhomogenes Modell der projektiven Ebene über dem Körper K.
Definition: Es sei  ein Körper,
ein Körper,  der Vektorraum
und
der Vektorraum
und  ,
,
 ,
,
wobei  der von
der von  aufgespannte Unterraum ist.
aufgespannte Unterraum ist.

-
 .
.
 heißt homogenes Modell der projektiven Ebene über .
heißt homogenes Modell der projektiven Ebene über .
Satz:  und
und  sind isomorphe projektive Ebenen.
sind isomorphe projektive Ebenen.
Die folgende Abbildung  bildet
auf
ab. Die projektive Gerade mit der Gleichung
bildet
auf
ab. Die projektive Gerade mit der Gleichung  wird dabei auf
wird dabei auf  abgebildet:
abgebildet:
 ,
falls
,
falls 
 ,
falls
,
falls  ,
falls
,
falls  .
.
Die Umkehrabbildung ist:

Definition:
- Permutationen der Punktmenge
 ,
die Geraden auf Geraden abbilden, heißen Kollineationen.
,
die Geraden auf Geraden abbilden, heißen Kollineationen. - Kollineationen von ,
die von linearen Abbildungen induziert werden, heißen
projektiv.
Bemerkung: In den projektiven Ebenen
und
gilt der Satz
von Pappos. Sie heißen deswegen pappussch.
Definition eines nicht ausgearteten projektiven Kegelschnitts
 in homogenen Koordinaten incl. inhomogenen Bezeichnungen
in homogenen Koordinaten incl. inhomogenen Bezeichnungen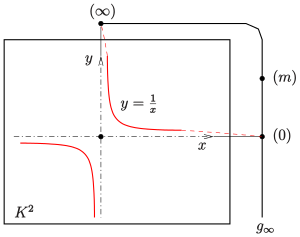 in inhomogenen Koordinaten: Hyperbel und Fernpunkte
in inhomogenen Koordinaten: Hyperbel und Fernpunkte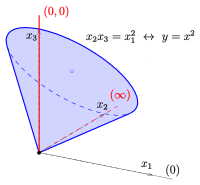
 in homogenen Koordinaten incl. inhomogenen Bezeichnungen
in homogenen Koordinaten incl. inhomogenen Bezeichnungen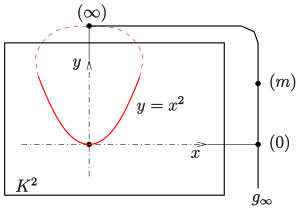 in inhomogenen Koordinaten: Parabel und Fernpunkt
in inhomogenen Koordinaten: Parabel und FernpunktEs werden zunächst die Kurven  als Quadriken in
(homogene Koordinaten) definiert. Die im vorigen Abschnitt erklärte Zuordnung
zwischen dem homogenen Modell
und dem inhomogenen Modell
liefert schließlich anschaulichere inhomogene Beschreibungen von .
als Quadriken in
(homogene Koordinaten) definiert. Die im vorigen Abschnitt erklärte Zuordnung
zwischen dem homogenen Modell
und dem inhomogenen Modell
liefert schließlich anschaulichere inhomogene Beschreibungen von .
Definition: Es sei
ein Körper. In
sei
 .
.
In
ist :
 .
.
Jedes Bild von
unter einer Kollineation von  heißt nicht ausgearteter projektiver Kegelschnitt. (Ausgeartete
Kegelschnitte sind: die leere Menge, 1 Punkt, 1 Gerade oder 2 Geraden.)
heißt nicht ausgearteter projektiver Kegelschnitt. (Ausgeartete
Kegelschnitte sind: die leere Menge, 1 Punkt, 1 Gerade oder 2 Geraden.)
Definition:  .
.
In
ist :
 .
.
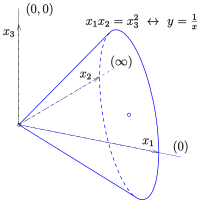
Bemerkung: Die Gleichungen  beschreiben im
Kegel mit Spitzen im Nullpunkt (s. Bilder).
enthält die
beschreiben im
Kegel mit Spitzen im Nullpunkt (s. Bilder).
enthält die  -
und
-
und  -Achsen,
enthält die -
und
-Achsen,
enthält die -
und  -Achsen.
-Achsen.
Lemma: Die n. a. Kegelschnitte in
sind projektiv äquivalent zu
(oder ).
(D.h., sie sind durch eine projektive Kollineation ineinander
überführbar.)
Bemerkung: Die lineare Abbildung  induziert eine projektive Kollineation, die
auf
abbildet. Im inhomogenen Modell wird diese Kollineation durch
induziert eine projektive Kollineation, die
auf
abbildet. Im inhomogenen Modell wird diese Kollineation durch  beschrieben.
beschrieben.
Bemerkung:
- Der „Einheitskreis“
 ist im Fall
ist im Fall  (d.h. 1+1=0) kein n. a. Kegelschnitt, da in diesem Fall die Gleichung
(d.h. 1+1=0) kein n. a. Kegelschnitt, da in diesem Fall die Gleichung
 eine Gerade beschreibt.
eine Gerade beschreibt. - Im Fall
 lässt sich die Gleichung
lässt sich die Gleichung  durch eine geeignete Koordinatentransformation in die Gleichung
überführen, d.h. der Einheitskreis ist nur im Fall
ein n. a. Kegelschnitt.
durch eine geeignete Koordinatentransformation in die Gleichung
überführen, d.h. der Einheitskreis ist nur im Fall
ein n. a. Kegelschnitt. - Im Fall
 schneidet der Einheitskreis die Ferngerade in zwei Punkten und ist im affinen
Teil mit einer Hyperbel zu vergleichen.
schneidet der Einheitskreis die Ferngerade in zwei Punkten und ist im affinen
Teil mit einer Hyperbel zu vergleichen.
Eigenschaften eines n.a. projektiven Kegelschnitts
Satz:
- Ein n.a. Kegelschnitt
- wird von einer Gerade
 in höchstens 2 Punkten geschnitten. Im Fall
in höchstens 2 Punkten geschnitten. Im Fall  heißt
Passante, im Fall
heißt
Passante, im Fall  Tangente und im Fall
Tangente und im Fall  Sekante.
Sekante. - hat in jedem Punkt genau eine Tangente.
- wird von einer Gerade
- Ein n.a. Kegelschnitt
ist symmetrisch zu jedem Punkt
 ,
durch den eine Sekante geht, d.h. es gibt eine involutorische
Zentralkollineation
,
durch den eine Sekante geht, d.h. es gibt eine involutorische
Zentralkollineation  mit Zentrum ,
die
invariant lässt.
mit Zentrum ,
die
invariant lässt. - Falls
 ist, besitzt ein n.a. Kegelschnitt
ist, besitzt ein n.a. Kegelschnitt  Punkte.
Punkte. - Es gelten die Pascalschen Sätze.
Beispiele von Symmetrien im Fall :
 ist für jedes
ist für jedes  eine Schrägspiegelung an der Gerade
eine Schrägspiegelung an der Gerade  ,
die
als Ganzes festlässt.
,
die
als Ganzes festlässt.  sind Fixpunkte auf .
Im Fall
sind Fixpunkte auf .
Im Fall  ist die Schrägspiegelung die normale Spiegelung an der y-Achse.
ist die Schrägspiegelung die normale Spiegelung an der y-Achse.- Die Involution
 ist die „Spiegelung“ (involutorische Zentralkollineation) mit der Achse
ist die „Spiegelung“ (involutorische Zentralkollineation) mit der Achse  und Zentrum
und Zentrum  .
Sie lässt
als Ganzes fest.
.
Sie lässt
als Ganzes fest.  sind Fixpunkte auf .
sind Fixpunkte auf .
Beispiele von Symmetrien im Fall :
 ist für jedes
eine involutorische Zentralkollineation mit Zentrum
ist für jedes
eine involutorische Zentralkollineation mit Zentrum  auf der Achse ,
die
als Ganzes festlässt.
auf der Achse ,
die
als Ganzes festlässt.  ist der einzige Fixpunkt auf .
(Auf
ist der einzige Fixpunkt auf .
(Auf  wirkt diese Abbildung als Translation in Richtung .)
wirkt diese Abbildung als Translation in Richtung .)- Die Involution
ist die involutorische Zentralkollineation mit Zentrum
 auf der Achse .
Sie lässt
als Ganzes fest.
auf der Achse .
Sie lässt
als Ganzes fest.  ist der einzige Fixpunkt auf .
ist der einzige Fixpunkt auf .
Bemerkung:
- Die Tangente im Punkt
 des Kegelschnitts
des Kegelschnitts  hat die Gleichung
hat die Gleichung  .
Im Fall
vereinfacht sich die Gleichung zu
.
Im Fall
vereinfacht sich die Gleichung zu  ,
d.h. alle Tangenten gehen durch den Punkt
,
d.h. alle Tangenten gehen durch den Punkt  .
.
 heißt der Knoten von .
heißt der Knoten von . - Im inhomogenen Modell hat
 im Punkt
im Punkt  die Tangente
die Tangente  .
Die Tangenten in den Fernpunkten
.
Die Tangenten in den Fernpunkten  sind die Koordinatenachsen. Im Fall
vereinfacht sich die Gleichung zu
sind die Koordinatenachsen. Im Fall
vereinfacht sich die Gleichung zu  ,
d.h. alle Tangenten gehen durch den Punkt
,
d.h. alle Tangenten gehen durch den Punkt  .
. - Im inhomogenen Modell hat
 im Punkt
die Tangente
im Punkt
die Tangente  .
Die Tangente im Fernpunkt
ist die Ferngerade. Im Fall
vereinfacht sich die Gleichung zu
.
Die Tangente im Fernpunkt
ist die Ferngerade. Im Fall
vereinfacht sich die Gleichung zu  ,
d.h. alle Tangenten gehen durch den Punkt
,
d.h. alle Tangenten gehen durch den Punkt  (Fernpunkt der x-Achse).
(Fernpunkt der x-Achse).
Bemerkung: Eine Punktmenge  mit den Eigenschaften
mit den Eigenschaften
-
wird von einer Garade in höchstens 2 Punkten geschnitten.
-
hat in jedem Punkt genau eine Tangente (Gerade die mit
nur einen Punkt gemeinsam hat).
heißt Oval.
Jeder n.a. Kegelschnitt ist ein Oval, aber nicht umgekehrt. Es gibt im reellen
Fall viele Ovale, die keine Kegelschnitte sind: z.B. die Kurve  oder beim Kegelschnitt
ersetzt man die Parabel durch die Kurve
oder beim Kegelschnitt
ersetzt man die Parabel durch die Kurve  oder man setzt zwei Ellipsenhälften von verschiedenen Ellipsen glatt zusammen.
Erst viele Symmetrien machen aus einem Oval einen Kegelschnitt.
oder man setzt zwei Ellipsenhälften von verschiedenen Ellipsen glatt zusammen.
Erst viele Symmetrien machen aus einem Oval einen Kegelschnitt.
Steiner-Erzeugung der Kegelschnitte k1, k2
 :
Vorgaben
:
Vorgaben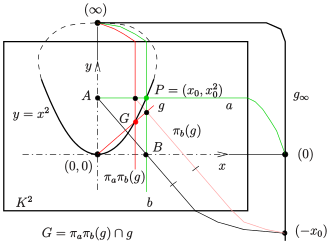
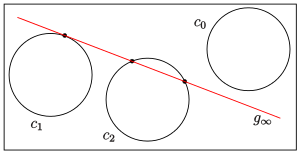
Ein n.a. projektiver Kegelschnitt kann auch nach Steiner folgendermaßen erzeugt werden (s. Satz von Steiner):
- Hat man für zwei Geradenbüschel in zwei Punkten
 (alle Geraden durch den Punkt
(alle Geraden durch den Punkt  bzw. )
eine projektive, aber nicht perspektive Abbildung
bzw. )
eine projektive, aber nicht perspektive Abbildung  des einen Büschels auf das andere, so bilden die Schnittpunkte zugeordneter
Geraden einen nicht ausgearteten projektiven Kegelschnitt.
des einen Büschels auf das andere, so bilden die Schnittpunkte zugeordneter
Geraden einen nicht ausgearteten projektiven Kegelschnitt.
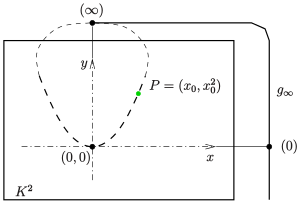
Erzeugung von :
Um den projektiven Kegelschnitt
(Parabel) zu erzeugen, geben wir im inhomogenen Modell
der projektiven Ebene die 3 Punkte  ,
die x-Achse als Tangente im Punkt
und die Ferngerade
als Tangente im Punkt
vor (s. Bild). Als Geradenbüschel verwenden wir die Büschel in
und .
Mit Hilfe der beiden Geraden
,
die x-Achse als Tangente im Punkt
und die Ferngerade
als Tangente im Punkt
vor (s. Bild). Als Geradenbüschel verwenden wir die Büschel in
und .
Mit Hilfe der beiden Geraden  und
und  als Achsen für Perspektivitäten
als Achsen für Perspektivitäten  (s. Satz
von Steiner) bilden wir zunächst das Geradenbüschel in
mit
(s. Satz
von Steiner) bilden wir zunächst das Geradenbüschel in
mit  auf das Büschel im Fernpunkt
auf das Büschel im Fernpunkt  (Parallelen zur Gerade
(Parallelen zur Gerade  )
und anschließend mit
)
und anschließend mit  auf das Büschel in
(Parallelen zur y-Achse) ab. Dabei wird die Gerade
auf das Büschel in
(Parallelen zur y-Achse) ab. Dabei wird die Gerade  zunächst mit der Gerade
geschnitten. Der Schnittpunkt ist
zunächst mit der Gerade
geschnitten. Der Schnittpunkt ist  .
Die Parallele zu
durch diesen Punkt ist
.
Die Parallele zu
durch diesen Punkt ist  .
Der Schnittpunkt mit
ist
.
Der Schnittpunkt mit
ist  .
Hieraus ergibt sich
.
Hieraus ergibt sich  .
Durchläuft
.
Durchläuft  alle Zahlen
so erhält man alle Punkte der Parabel .
alle Zahlen
so erhält man alle Punkte der Parabel .
Bemerkung: Die x-Achse wird bei der projektiven Abbildung  auf die y-Achse und die y-Achse auf die Ferngerade abgebildet.
auf die y-Achse und die y-Achse auf die Ferngerade abgebildet.
Bemerkung: Die Steiner-Erzeugung von
liefert eine einfache Methode, viele Punkte einer Parabel zu erzeugen. Siehe: Parabel.
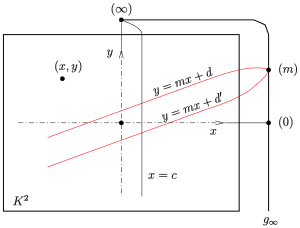
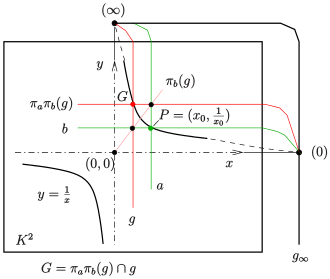
Erzeugung von :
Um den projektiven Kegelschnitt
(Hyperbel) zu erzeugen, geben wir im inhomogenen Modell
der projektiven Ebene die 3 Punkte  ,
die x-Achse als Tangente im Punkt
und die y-Achse als Tangente im Punkt
vor. Als Geradenbüschel verwenden wir die Büschel in
und .
bildet zunächst das Büschel in
auf das Hilfsbüschel im Punkt
ab. Aufgrund der Symmetrie ist dieser Fall rechnerisch leichter zu erfassen. Man
rechnet leicht nach, dass die Gerade
,
die x-Achse als Tangente im Punkt
und die y-Achse als Tangente im Punkt
vor. Als Geradenbüschel verwenden wir die Büschel in
und .
bildet zunächst das Büschel in
auf das Hilfsbüschel im Punkt
ab. Aufgrund der Symmetrie ist dieser Fall rechnerisch leichter zu erfassen. Man
rechnet leicht nach, dass die Gerade  durch die projektive Abbildung
auf die Gerade
durch die projektive Abbildung
auf die Gerade  abgebildet wird (s. Bild).
abgebildet wird (s. Bild).
Bemerkung:
- Die y-Achse wird bei der projektiven Abbildung
auf
und
auf die x-Achse abgebildet.
- Die Abbildung zeigt auch den Zusammenhang der Steiner-Erzeugung mit einer affinen Version der 4-Punkte Ausartung des Satzes von Pascal.
Bemerkung: Eine Erzeugung der Hyperbel  findet man hier.
findet man hier.
Polarität und v. Staudt-Kegelschnitt
Ein n.a. projektiver Kegelschnitt kann im Fall  auch nach Karl von Staudt als die Menge der selbstpolaren Punkte einer hyperbolischen
projektiven Polarität
aufgefasst werden.
auch nach Karl von Staudt als die Menge der selbstpolaren Punkte einer hyperbolischen
projektiven Polarität
aufgefasst werden.
Für einen Vektorraum  über einem Körper
sei
über einem Körper
sei  eine Abbildung von
in
mit den folgenden Eigenschaften
eine Abbildung von
in
mit den folgenden Eigenschaften
- (Q1)
 für jedes
für jedes  und
und  .
. - (Q2)
 ist eine Bilinearform.
ist eine Bilinearform.
heißt quadratische Form. (Die Bilinearform  ist sogar symmetrisch, d.h.
ist sogar symmetrisch, d.h.  .
)
.
)
Im Fall  gilt
gilt  ,
d.h.
und
bestimmen sich gegenseitig in eindeutiger Weise.
,
d.h.
und
bestimmen sich gegenseitig in eindeutiger Weise.
Im Fall  ist
ist  .
.
Im Folgenden sei  .
Dann ist
.
Dann ist  .
.
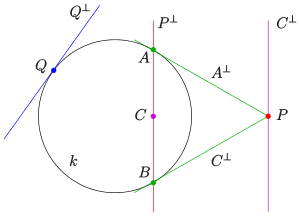
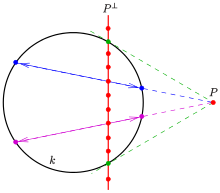
Für einen Punkt  ist
ist
 eine Gerade und heißt die Polare von .
heißt der Pol von
eine Gerade und heißt die Polare von .
heißt der Pol von 
Die Zuordnung  ist eine projektive
hyperbolische Polarität. Hyperbolisch bedeutet, dass es Punkte
gibt, die auf ihren Polaren liegen. Solche Punkte heißen selbstpolar.
(Falls eine Polarität keine selbstpolaren Punkte besitzt, heißt die Polarität
elliptisch.)
ist eine projektive
hyperbolische Polarität. Hyperbolisch bedeutet, dass es Punkte
gibt, die auf ihren Polaren liegen. Solche Punkte heißen selbstpolar.
(Falls eine Polarität keine selbstpolaren Punkte besitzt, heißt die Polarität
elliptisch.)
Eigenschaften der Polarität:
- Die Polare eines Kegelschnittpunktes ist die Tangente in diesem Punkt.
 (s. Bild),
(s. Bild), .
.
Startet man nun umgekehrt mit einer projektiven hyperbolischen
Polarität
in der projektiven Ebene ,
so wird diese durch eine reguläre symmetrische Bilinearform
auf
beschrieben. Im Fall
ist dann  eine quadratische Form, die einen nicht ausgearteten Kegelschnitt
beschreibt. Ein so definierter Kegelschnitt heißt v.
Staudt-Kegelschnitt.
eine quadratische Form, die einen nicht ausgearteten Kegelschnitt
beschreibt. Ein so definierter Kegelschnitt heißt v.
Staudt-Kegelschnitt.
Bemerkung: Die lineare Abbildung  induziert die involutorische Zentralkollineation
mit Achse
und Zentrum ,
die
invariant lässt (s. Abschnitt „Eigenschaften eines n.a. Kegelschnitts“).
induziert die involutorische Zentralkollineation
mit Achse
und Zentrum ,
die
invariant lässt (s. Abschnitt „Eigenschaften eines n.a. Kegelschnitts“).
Bemerkung: Polaritäten gibt es auch für die affinen Kegelschnitte Ellipse, Parabel und Hyperbel.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 22.10. 2021