Großsignalverhalten
Die Begriffe Großsignalverhalten und Kleinsignalverhalten sind im Zusammenhang mit nichtlinearen Übertragungssystemen relevant. Im Gegensatz zum Kleinsignalverhalten eines Übertragungssystems, das sich auf einen Arbeitspunkt der Kennlinie des Ein-/Ausgangsverhaltens eines Übertragungssystems bezieht, bedeutet das Großsignalverhalten, dass die Eingangsgröße des Systems alle Werte zwischen Null und Maximum einnehmen kann. Es interessiert beim Großsignalverhalten eines gemischt linearen und nichtlinearen dynamischen Systems, wie sich jeweils die Ausgangsgröße des Gesamtsystems nach genügend langer Zeit zur Eingangsgröße des Systems verhält. Durch geeignete Linearisierungsmethoden können bei nichtlinearen Einzelsystemen gut angenäherte lineare Ergebnisse erreicht werden.
Bei einem linearen zeitinvarianten
dynamischen Übertragungssystem verhält sich die Signalübertragung des
Ausgangssignals nach genügend langer Zeit proportional zu seinem Eingangssignal.
Bei dieser Form des Übertragungssystems ist das Großsignalverhalten identisch
mit dem Kleinsignalverhalten  .
.
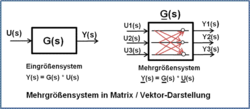
Die Berechnung des Ein-/Ausgangsverhaltens bei einem Übertragungssystem als Reihenschaltung, Parallelschaltung und zurückgeführten Systemen (Regelkreise) mit gemischt linearen und nichtlinearen Systemen erfolgt ausschließlich mittels der numerischen Mathematik.
Definition dynamisches System
Ein dynamisches System ist eine abgegrenzte Funktionseinheit mit einem bestimmten Zeitverhalten und hat mindestens einen Signaleingang und einen Signalausgang.
Modelle (Modellbildung) eines realen dynamischen Übertragungssystems werden mathematisch beschrieben durch:
- Differentialgleichungen,
 ,
, - Übertragungsfunktion
und Frequenzgang,
 ,
, - Zustandsraumdarstellung (incl. Zustandsgleichungen),
- Differenzengleichungen
für lineare dynamische Systeme,

- Statische Nichtlinearität wird häufig durch sogenannte logische WENN - DANN - SONST-Anweisungen oder Tabellenwerte beschrieben.
Die Übertragungsfunktion, als häufigste Beschreibung linearer Übertragungssysteme, stellt die Abhängigkeit des Ausgangssignals eines linearen, zeitinvarianten Systems (LZI-System) von dessen Eingangssignal im Bildbereich (Frequenzbereich, s-Bereich) dar. Sie beschreibt das Eigenverhalten des Übertragungssystems vollständig und unabhängig von den Signalen. Eine Übertragungsfunktion ermöglicht es somit, das Ausgangssignal des Übertragungssystems aus dem Eingangssignal und der Übertragungsfunktion zu berechnen.
Die Übertragungsfunktion wird definiert als Quotient der
Laplace-transformierten Ausgangsgröße  zur transformierten Eingangsgröße
zur transformierten Eingangsgröße  :
:
- .
Wenn sich das dynamische System im Ruhezustand befindet, haben die internen
Energiespeicher den Wert Null. Unter dieser Bedingung, dass die
Anfangsbedingungen der systembeschreibenden Differenzialgleichung zu dem
betrachteten Zeitpunkt  sind, entspricht die Übertragungsfunktion des Systems gleich der
Laplace-transformierten Differenzialgleichung des Systems.
sind, entspricht die Übertragungsfunktion des Systems gleich der
Laplace-transformierten Differenzialgleichung des Systems.
Definition statisches System
Ein statisches lineares Übertragungssystem wird durch ein algebraisches Modell beschrieben und hat kein Zeitverhalten.
Nichtlineare dynamische Übertragungssysteme sind meistens Unikate und können in der Regel nur mit der numerischen Mathematik rechnerisch behandelt werden. Ein derartiges System kann nach dem Hammerstein-Modell in ein statisches nichtlineares System und ein dynamisches lineares System zerlegt werden. Zur Beschreibung eines nichtlinearen Modells kommen häufig sogenannte logische WENN - DANN - SONST-Anweisungen oder Tabellenwerte zur Anwendung.
Verhalten nichtlineares System
Bei einem nichtlinearen statischen oder dynamischen Übertragungssystem
besteht für  keine Proportionalität zum Eingangs-Ausgangsverhalten. Nichtlineare
Übertragungssysteme kommen in der Praxis sehr häufig in verschiedenen Formen
vor.
keine Proportionalität zum Eingangs-Ausgangsverhalten. Nichtlineare
Übertragungssysteme kommen in der Praxis sehr häufig in verschiedenen Formen
vor.
Übertragungssysteme mit gemischten linearen und nichtlinearen Systemen können
nur mit numerischen Methoden berechnet werden. Dazu eignen sich
Differenzengleichungen, die das Verhalten der linearen Glieder beschreiben.
Dabei werden im Abstand der diskreten Zeit  die Eingangsgrößen eines jeden Übertragungsgliedes als Folgeglieder
die Eingangsgrößen eines jeden Übertragungsgliedes als Folgeglieder  Punkt für Punkt zu Ausgangsgrößen berechnet.
Punkt für Punkt zu Ausgangsgrößen berechnet.
Eine Differenzengleichung ist eine numerisch lösbare Berechnungsvorschrift
für eine diskret
definierte Folge ![{\displaystyle k=[0,\ 1,\ 2,\ 3,...]}](/svg/b3a22a6e6519241477e720bbbc70875489e39359.svg) von Folgegleichungen, welche Variablen
von Folgegleichungen, welche Variablen  zu fortlaufenden nummerierten Ereignissen bzw. nummerierten Zeitpunkten im
Abstand eines Intervalls
berechnen.
zu fortlaufenden nummerierten Ereignissen bzw. nummerierten Zeitpunkten im
Abstand eines Intervalls
berechnen.
Die nichtlineare statische Funktion wird als mathematisches Modell definiert
und in Form einer Tabelle ebenfalls für ein gegebenes Eingangssignal die
zugehörige Ausgangsgröße Punkt für Punkt berechnet. Das Gesamtergebnis einer
Kette von Einzelgliedern liegt in Form einer Tabelle mit sämtlichen Ein- und
Ausgangs-Berechnungspunkten vor. Die Tabelle beschreibt den Zeitraum der
Berechnungsfolgen  .
.
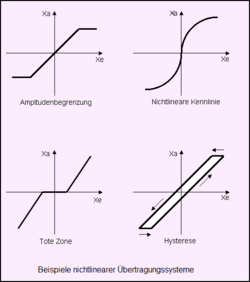
Darstellung der häufigsten nichtlinearen Funktionen
In der Praxis besteht eine technische Regelstrecke meist aus Hardware-Systemen, welche durch die verwendeten Komponenten selten ideale mathematisch beschreibbare Eigenschaften haben. Darunter fallen z. B. Motoren, Stellaggregate, Heizelemente, Federn, Linearventile, Schaltventile, Messwertaufnehmer und andere. Sind die nichtlinearen Anteile klein gegenüber dem Gesamtverhalten eines Systems, können sie vernachlässigt werden.
Ein Ventil kann nur zu 100 % geöffnet sein und ein Elektromotor darf nicht über seine maximale Leistung betrieben werden. Begrenzungen des Reglers und der Strecke müssen wegen der Regeldynamik aufeinander abgestimmt sein. Signal- bzw. Stellgrößenbegrenzungen wirken dämpfend, zeitverzögernd auf das Großsignalverhalten der Regelgröße. Die numerische Berechnung der Begrenzungsfunktion lässt sich einfach über logische Kriterien erreichen. Das Getriebespiel mechanischer Getriebe kann häufig durch das Verhalten von Hysterese und Totzone mit logischen Befehlen beschrieben werden.
Typische Formen des Ein-Ausgangsverhalten nichtlinearer Systeme:
- Begrenzungseffekte von Signalen,
- Quadratisches oder exponentielles Verhalten,
- Hystereseverhalten,
- Tote Zone.
Verfahren der Linearisierung nichtlinearer Funktionen
Nichtlineare Übertragungssysteme können als Einzelsysteme mit verschiedenen Maßnahmen linearisiert werden. Insbesondere in der Regelungstechnik werden zur Stabilitätsbetrachtung lineare Übertragungssysteme gewünscht. Damit erleichtert sich die Stabilitätsbetrachtung mit Anwendung geläufiger konventioneller Verfahren. Das Gleiche gilt auch für Simulationen des Regelkreises mittels der numerischen Mathematik. Das Verhalten von Regelkreisen mit Regler und Regelstrecke lässt sich komplett durch Simulation an einem Computer nachbilden, indem für die Beschreibung der linearen Übertragungsglieder zeitdiskret Differenzengleichungen berechnet werden.
- Da nichtlineare Systeme in ihren vielfältigen Erscheinungsformen einzigartig sind, ist die mathematische Beschreibung häufig nur mit Hilfe von logischen Befehlen oder Tabellen möglich.
- Bei nichtstetigen Regelungen sind für den Regler mit dem Zweipunktverfahren und Dreipunktverfahren die nichtlinearen Effekte wie Hysterese und Totzone erwünscht. Sie lassen sich mit den logischen WENN - DANN - SONST-Anweisungen leicht beschreiben.
- Die Einbindung verschiedenen Regelstreckenkomponenten in den Regelkreis durch die Rückführung zwingt zur Proportionalität.
- Aufwendigere Lösungen bei vielen stark unterschiedlichen Einzelkomponenten der Regelstrecke bietet die Kaskadenregelung.
Linearisierungsmaßnahmen:
Aufgabe der Linearisierungsmaßnahmen eines nichtlinearen statischen meist Hardware-Übertragungssystems ist mit Hilfe von zusätzlicher Hardware oder Software eine noch akzeptierbare Linearisierung des Übertragungssystems zu erreichen. Dazu bieten sich mehrere Maßnahmen an.
- Linearisierung durch Rückführung:
- Wenn eine stetige Nichtlinearität der Regelstrecke im Vorwärtszweig eines Regelkreises liegt, zwingt die Rückführung der Regelgröße zur Linearität des Ausgangs- Eingangsverhalten des Regelkreises.
- Ist eine nichtlineare Komponente aus dem Gesamtsystem der Regelstrecke trennbar, kann sie zur Linearisierung in einen Hilfsregelkreis im Vorwärtszweig eingebunden werden. Damit wird Proportionalität des Ein- Ausgangsverhaltens des Hilfsregelkreises erreicht.
- Ein Regelkreis mit einer stetigen nichtlinearen Funktion in der Regelstrecke, z. B. mit einer Funktion mit exponentiellem Verhalten, kann nicht optimal geregelt werden, weil die Parametrierung des Reglers auf die größte Verstärkung der Strecke eingestellt werden muss, anderenfalls kann der Regelkreis je nach Anzahl der Verzögerungsglieder instabil werden.
- Eine nicht exakte Invertierungsfunktion der Nichtlinearität der Strecke kann in einen Regler eingebracht werden. Damit erreicht man eine angenähert konstante Kreisverstärkung und eine relativ optimale Parametrierung des Reglers.
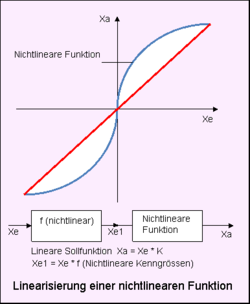
- Kompensation mit "Inverser Nichtlinearität"
- Abhilfe kann eine Kompensationsfunktion (Inverse Nichtlinearität) als ein nichtlineares Netzwerk als Hardware im Eingang des nichtlinearen Systems bringen. Dies geschieht in der Weise, dass eine spiegelbildliche nichtlineare inverse Funktion das Verhalten der nichtlinearen Funktion kompensiert.
- Für einen digitalen Regler wäre das nur eine Tabelle, die berücksichtigt werden muss, damit die Nichtlinearität zu einer linearen Funktion mit proportionalem Verhalten gewandelt werden kann.
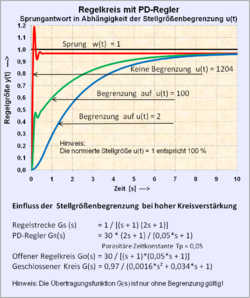
- Signalbegrenzung
- Eine Stellgrößenbegrenzung eines Reglers ist unvermeidbar, wenn die Ausgangsleistungsstufe des Reglers, z. B. die Ausgangsspannung, nicht weiter wachsen kann. Je nach Größe der Begrenzung kann eine Sprungantwort stark verzögert werden.
- Wie alle nichtlinearen Funktionen können Begrenzungseffekte nicht mit der Übertragungsfunktion G(s) beschrieben werden.
- Die numerische Berechnung der Begrenzungsfunktion lässt sich einfach über sogenannte logische WENN - DANN - SONST-Anweisungen erreichen.
- Tote Zone (Ansprechempfindlichkeit)
- Bei Messfühlern tritt manchmal der Effekt auf, dass eine bestimmte Größe des Messwertes überschritten werden muss, damit der Messfühler ein Signal abgibt. Für einen Regelkreis bedeutet dies, dass kleine Sollwerte und damit kleine Regelgrößen nicht eingestellt werden können. Ist die Ansprechempfindlichkeit reproduzierbar, lässt sich die Kennlinie des Messfühlers mit logischen Befehlen versetzen.
- Hysterese
- Durch Reibung an Ventilen, durch magnetische Effekte z.B. bei Relais oder durch Mitkopplung an Operationsverstärkern kann der Hystereseeffekt auftreten. Die Hysterese kann bei unstetiger und stetiger Signalverarbeitung auftreten.
- Für unstetige Regler ist die Hysteresefunktion erwünscht. Zweipunktregler vergleichen die Regelgröße mit einem meist hysteresebehafteten Schaltkriterium und kennen nur zwei Zustände: „Ein“ oder „Aus“. Diese so definierten Zweipunktregler haben theoretisch kein Zeitverhalten.
- Für die stetige Regelung ist der Hystereseeffekt sehr unerwünscht.
- Abhilfe: Der Einfluss der Hysterese kann kompensiert werden, indem die zu ermittelnde Signalrichtung einen Signalbetrag auf den Ausgang des Systems addiert oder subtrahiert.
Siehe auch
- Regler
- Regelungstechnik
- Differenzengleichung
- Digitaler Regler
- Systemtheorie (Ingenieurwissenschaften)
- Zustandsraumdarstellung
Literatur
- Gerd Schulz: Regelungstechnik 1. 3. Auflage. Verlag Oldenbourg, 2004.
- Serge Zacher, Manfred Reuter: Regelungstechnik für Ingenieure. 14. Auflage. Springer Vieweg Verlag, 2014, ISBN 978-3-8348-1786-0


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 08.12. 2025