Kleinsignalverhalten
Das Kleinsignalverhalten beschreibt das Verhalten eines Systems bei Aussteuerung mit kleinen Signalen, wobei das Wort „klein“ nicht als geringer Abstand zum Nullpunkt, sondern zu einem Arbeitspunkt zu verstehen ist. Für diese Kleinsignale erreicht man in einem beschränkten, aber für die Aufgabe wesentlichen Bereich ein näherungsweise lineares Übertragungsverhalten zwischen Eingangs- und Ausgangssignal.
Linearität ist zum Beispiel Voraussetzung für die Anwendung der Laplace-Transformation in der Systemtheorie/Elektrotechnik zwecks Systemanalyse.
Anwendungsgebiet
Die Beschreibung mittels des Kleinsignalverhaltens wird angewendet bei nichtlinearen Bauelementen und analog-elektronischen Schaltungen, die Transistoren oder andere nichtlineare Halbleiterbauteile enthalten. Die Arbeitspunkte der Bauteile werden dabei so gewählt, dass weder die Grenzen des Aussteuerbereiches noch stärker nichtlineare Bereiche der Übertragungskennlinie erreicht werden. Durch eine kleine Aussteuerung um den Arbeitspunkt herum ergibt sich näherungsweise ein linearer Zusammenhang zwischen der Eingangs- und der Ausgangsgröße.
Jede Nichtlinearität erzeugt Verzerrung. Es entstehen Oberschwingungen, was gleichbedeutend mit einer Steigerung des Klirrfaktors ist. Die Grenze für das Kleinsignalverhalten ergibt sich aus der Grenze, wie weit die Verzerrung akzeptiert werden kann.
Lineare Näherung
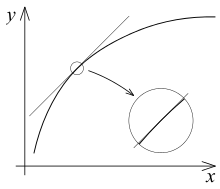
Eine stetig gekrümmte Kennlinie kann in einem willkürlich gewählten Arbeitspunkt durch ihre Tangente in diesem Punkt linear angenähert werden. Solange das Verhalten des Bauteils durch die Tangente beschreibbar ist, spricht man von seinem Kleinsignalverhalten.
Bei bekannter Übertragungs-Funktion kann man diese durch eine Taylorreihe approximieren. Da man beim Kleinsignalverhalten nur lineare Anteile berücksichtigt, bricht man die Reihenentwicklung um den Arbeitspunkt A nach dem linearen Glied ab.
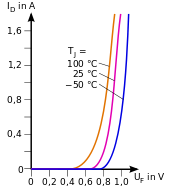
- Beispiel Diode
Die Strom-Spannungs-Kennlinie einer Silizium-Halbleiterdiode
im Durchlassbereich (für den Diodenstrom  bei positiver Spannung
bei positiver Spannung  )
lässt sich im Wesentlichen durch die Shockley-Gleichung
beschreiben.
)
lässt sich im Wesentlichen durch die Shockley-Gleichung
beschreiben.

Der lineare Taylor-Ansatz

ergibt in dieser Anwendung

und nach dem Einsetzen und Differenzieren

Für die Kleinsignalgrößen  und
und  erhält man
erhält man

Damit entspricht das Kleinsignalverhalten einer Diode dem eines differenziellen
Widerstands, dessen Wert  umgekehrt proportional zur Stromstärke im Arbeitspunkt ist.
umgekehrt proportional zur Stromstärke im Arbeitspunkt ist.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 21.04. 2022