Hauptstreckung
Die Hauptstreckungen  bezeichnen in der Kontinuumsmechanik
die drei Hauptwerte
der einander mathematisch ähnlichen
rechten und linken Deformationstensors
U bzw. v. Man erhält die Hauptstreckungen aus der Hauptachsentransformation
des Deformationstensors durch Lösung des charakteristischen
Polynoms.
bezeichnen in der Kontinuumsmechanik
die drei Hauptwerte
der einander mathematisch ähnlichen
rechten und linken Deformationstensors
U bzw. v. Man erhält die Hauptstreckungen aus der Hauptachsentransformation
des Deformationstensors durch Lösung des charakteristischen
Polynoms.
Im Hauptachsensystem
des Deformationstensors geben die Streckungen  die aktuelle Länge
die aktuelle Länge  eines Linienelements bezogen auf seine Ausgangslänge
eines Linienelements bezogen auf seine Ausgangslänge  wieder und stehen daher mit der Dehnung
wieder und stehen daher mit der Dehnung
 im Zusammenhang:
im Zusammenhang:
 .
.
Mithilfe dieser Streckungen lassen sich ebenfalls die Deformationsinvarianten in der Festkörpermechanik (Kontinuumsmechanik der Festkörper) recht einfach darstellen.
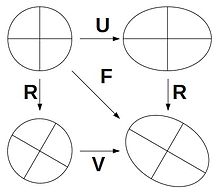
Denn der rechte und linke Deformationstensor ergeben sich aus der Polarzerlegung [1]

des Deformationsgradienten
F, siehe Bild. Darin ist R ein eigentlich orthogonaler
Tensor, der eine Drehung darstellt und die Eigenschaften
RT · R = R · RT = 1 und
det(R) = +1 besitzt (1 ist der Einheitstensor).
Der Deformationsgradient transformiert Linienelemente  im undeformierten Körper in die Linienelemente
im undeformierten Körper in die Linienelemente  des deformierten Körpers:
des deformierten Körpers:

Damit lautet die Streckung eines Linienelements in der Lagrange’schen Betrachtungsweise:

denn die Drehung R lässt die Norm unberührt. Sei
Eigenvektor mit Eigenwert λ des positiv definiten
rechten Strecktensors U. Dann berechnet sich

Für den linken Strecktensor v bestimmt sich in der Euler’schen Betrachtungsweise:

wieder weil die Rotation die Norm beibehält. Sei
Eigenvektor mit Eigenwert λ des ebenfalls positiv
definiten linken Strecktensors v. Dann zeigt sich

und weiter

Die Hauptstreckungen in der Lagrange’schen- und Euler’schen Betrachtungsweise sind gleich aber die Richtungen, in denen die Hauptstreckungen auftreten, sind gemäß

gegeneinander verdreht, so wie es die Kreuze im Bild auch nahelegen.
Anmerkungen
- ↑ Die Groß- und Kleinschreibung der Variablen ist zu beachten. Variablen in Großbuchstaben beziehen sich auf den Referenzzustand und solche in Kleinbuchstaben auf den aktuellen Zustand, der gegenüber dem Referenzzustand stark deformiert und verdreht sein kann.
Literatur
- H. Altenbach: Kontinuumsmechanik. Springer, 2012, ISBN 978-3-642-24118-5.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 06.12. 2020