Mittelwertsatz der Differentialrechnung
Der Mittelwertsatz ist ein zentraler Satz der Differentialrechnung, eines Teilgebiets der Analysis (Mathematik).
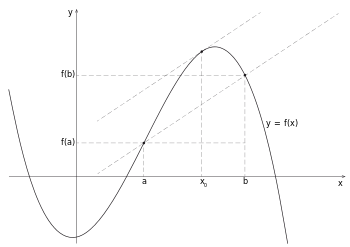
Veranschaulicht lässt sich der Mittelwertsatz geometrisch so deuten, dass es unter den unten genannten Voraussetzungen zwischen zwei Punkten eines Funktionsgraphen mindestens einen Kurvenpunkt gibt, für den die Tangente parallel zurSekante durch die beiden gegebenen Punkte ist.
Die Aussage des Satzes lässt sich sowohl auf den Quotienten zweier Funktionen übertragen als auch auf Funktionen mehrerer Variablen anwenden.
Aussage des Mittelwertsatzes
Es sei ![f: [a,b] \to \mathbb{R}](/svg/b592d102ccd1ba134d401c5b3ea177baaba3ffac.svg) eine Funktion,
die auf dem abgeschlossenen Intervall
eine Funktion,
die auf dem abgeschlossenen Intervall ![[a,b]](/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg) (mit
(mit  )
definiert und stetig
ist. Außerdem sei die Funktion
)
definiert und stetig
ist. Außerdem sei die Funktion  im offenen Intervall
im offenen Intervall  differenzierbar.
Unter diesen Voraussetzungen gibt es mindestens ein
differenzierbar.
Unter diesen Voraussetzungen gibt es mindestens ein  ,
so dass
,
so dass

gilt.
Geometrisch gedeutet bedeutet dies, dass die Sekantensteigung an mindestens einer Zwischenstelle als Steigung der Tangente an den Graphen der Funktion auftritt.
Beweis im eindimensionalen Fall
Es sei eine Hilfsfunktion ![h:[a,b]\to {\mathbb {R}}](/svg/1833b6178fc06e33367b794d4c27d8f9e1a9f36e.svg) definiert, mit
definiert, mit

 ist stetig in
und in
differenzierbar. Es gilt
ist stetig in
und in
differenzierbar. Es gilt  .
.
Nach dem Satz von Rolle existiert daher ein
mit  .
Da
.
Da

folgt die Behauptung.
Beispiel einer Anwendung des Mittelwertsatzes
Als typische Anwendung des Mittelwertsatzes kann gezeigt werden, dass

für alle  gilt: Ohne Einschränkung können wir
annehmen. Da die Sinusfunktion im Intervall
differenzierbar ist, existiert nach dem Mittelwertsatz ein ,
so dass
gilt: Ohne Einschränkung können wir
annehmen. Da die Sinusfunktion im Intervall
differenzierbar ist, existiert nach dem Mittelwertsatz ein ,
so dass

gilt. Wegen  für alle
für alle  ,
erhält man
,
erhält man

Allgemein kann so nachgewiesen werden, dass stetig differenzierbare Funktionen lokal Lipschitz-stetig sind.
Erweiterter Mittelwertsatz der Differentialrechnung
Der Mittelwertsatz lässt sich in folgender Weise verallgemeinern:
Es seien
und ![g:[a,b]\to {\mathbb {R}}](/svg/8b1d5103d0e36767a27715bcfc57137119294aad.svg) zwei Funktionen, die auf dem abgeschlossenen Intervall
(mit )
definiert und stetig und auf dem offenen Intervall
differenzierbar sind. Unter diesen Voraussetzungen existiert mindestens ein
,
so dass
zwei Funktionen, die auf dem abgeschlossenen Intervall
(mit )
definiert und stetig und auf dem offenen Intervall
differenzierbar sind. Unter diesen Voraussetzungen existiert mindestens ein
,
so dass

gilt.
Wird zusätzlich  auf dem Intervall
vorausgesetzt, so ist insbesondere
auf dem Intervall
vorausgesetzt, so ist insbesondere  sowie
sowie  und man kann den erweiterten Mittelwertsatz in der üblichen Bruchform
schreiben,
und man kann den erweiterten Mittelwertsatz in der üblichen Bruchform
schreiben,
-
 .
.
Beweis
Ist  ,
so muss für den verallgemeinerten Mittelwertsatz der Differentialrechnung
gezeigt werden, dass für ein
Folgendes gilt
,
so muss für den verallgemeinerten Mittelwertsatz der Differentialrechnung
gezeigt werden, dass für ein
Folgendes gilt
 .
.
Nach dem Satz
von Rolle gibt es ein  ,
für das
,
für das  gilt.
gilt.
Ist ,
so kann man die Funktion

auf dem Intervall
definieren. Da  gilt, gibt es nach dem Satz von Rolle ein
mit
gilt, gibt es nach dem Satz von Rolle ein
mit  ,
also
,
also
 .
.
Durch Umstellen dieser Gleichung folgt die Behauptung.
Mittelwertsatz für reellwertige Funktionen mehrerer Variablen
In der mehrdimensionalen Analysis lautet der Mittelwertsatz wie folgt:
Es sei  eine Abbildung mit
eine Abbildung mit  ,
weiter sei
differenzierbar auf einer offenen Menge
,
weiter sei
differenzierbar auf einer offenen Menge  .
Außerdem seien
.
Außerdem seien  mit
mit  und ihre Verbindungsstrecke
und ihre Verbindungsstrecke  .
Dann existiert mindestens ein
.
Dann existiert mindestens ein  mit
mit  und
und  und es gilt:
und es gilt:

Für  entspricht der Satz dem oben erwähnten Mittelwertsatz der eindimensionalen
Differentialrechnung.
entspricht der Satz dem oben erwähnten Mittelwertsatz der eindimensionalen
Differentialrechnung.  bezeichnet hierbei den Gradienten
an der Stelle ,
der in einem Skalarprodukt
auftritt.
bezeichnet hierbei den Gradienten
an der Stelle ,
der in einem Skalarprodukt
auftritt.
Geometrisch gedeutet, tritt die Sekantensteigung zwischen  und
und  an mindestens einer Stelle aus
an mindestens einer Stelle aus  als Steigung in Richtung des Vektors
als Steigung in Richtung des Vektors  auf.
auf.
Beweis im mehrdimensionalen Fall
Betrachtet man die Funktion  mit
mit
 ,
,
so ist
stetig auf ![[0,1]](/svg/738f7d23bb2d9642bab520020873cccbef49768d.svg) und differenzierbar auf
und differenzierbar auf  .
Somit folgt aus dem Mittelwertsatz der eindimensionalen Analysis, dass ein
.
Somit folgt aus dem Mittelwertsatz der eindimensionalen Analysis, dass ein  derart existiert, dass
derart existiert, dass
 .
.
Aus der Kettenregel folgt nun:
 .
.
Dies lässt sich folgendermaßen zusammenfassen:

Substituiert man nun  durch
durch  ,
so ergibt sich
,
so ergibt sich
 ,
,
womit die Aussage des Satzes bewiesen wäre.
Mittelwertsatz für vektorwertige Funktionen mehrerer Variablen
Eine Ausdehnung des Satzes auf Funktionen  ist nur unter veränderten geometrischen Voraussetzungen bzw. Verschärfungen
möglich. Insbesondere wird der Pool der in Frage kommenden linearen Abbildungen
erheblich über die Ableitungen auf der Strecke
hinaus erweitert:
ist nur unter veränderten geometrischen Voraussetzungen bzw. Verschärfungen
möglich. Insbesondere wird der Pool der in Frage kommenden linearen Abbildungen
erheblich über die Ableitungen auf der Strecke
hinaus erweitert:
Falls die Ableitungen von
auf der gesamten Strecke
beschränkt sind (es handelt sich um Jacobimatrizen, also
beschränkt bezüglich einer Norm
auf  ,
zum Beispiel der Operatornorm),
so gibt es eine lineare Abbildung
,
zum Beispiel der Operatornorm),
so gibt es eine lineare Abbildung  aus der abgeschlossenen konvexen
Hülle der Ableitungen auf der Verbindungsstrecke, sodass
aus der abgeschlossenen konvexen
Hülle der Ableitungen auf der Verbindungsstrecke, sodass

gilt.
Der Beweis hierfür erfolgt über den Hauptsatz der Differential- und
Integralrechnung auf die Hilfsfunktionen  . Warum die Ableitungen auf der Strecke
nicht ausreichen, kann man folgendermaßen verstehen: Auf die einzelnen
Komponenten
. Warum die Ableitungen auf der Strecke
nicht ausreichen, kann man folgendermaßen verstehen: Auf die einzelnen
Komponenten  der vektorwertigen
Funktion
der vektorwertigen
Funktion  kann einerseits der Mittelwertsatz für reellwertige Funktionen mehrerer
Veränderlicher angewandt werden. Andererseits ist keinesfalls gewährleistet,
dass die zugehörige Stelle auf ,
an der die passende Ableitung gefunden wird, für alle Komponentenfunktionen
dieselbe ist. Man muss sich daher in einer größeren Menge umschauen, eben der
konvexen Hülle der Ableitungen auf der Strecke.
kann einerseits der Mittelwertsatz für reellwertige Funktionen mehrerer
Veränderlicher angewandt werden. Andererseits ist keinesfalls gewährleistet,
dass die zugehörige Stelle auf ,
an der die passende Ableitung gefunden wird, für alle Komponentenfunktionen
dieselbe ist. Man muss sich daher in einer größeren Menge umschauen, eben der
konvexen Hülle der Ableitungen auf der Strecke.
Anschauliche Bedeutung
Beschreibt die Funktion beispielsweise eine Strecke in Abhängigkeit von einer Zeit, dann ist die Ableitung die Geschwindigkeit. Der Mittelwertsatz besagt dann: Auf dem Weg von A nach B muss man mindestens zu einem Zeitpunkt so schnell gewesen sein wie seine Durchschnittsgeschwindigkeit.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 05.02. 2019