Windschiefe
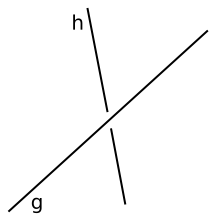
In der Geometrie nennt man zwei Geraden windschief, wenn sie sich weder schneiden noch parallel zueinander sind. Dies ist im zweidimensionalen Raum nicht möglich, da hier alle denkbaren Geraden in der gleichen Ebene liegen und sich schneiden oder parallel sind. Windschiefe Geraden gibt es daher nur in mindestens dreidimensionalen Räumen.
Das Wort „windschief“ stammt von der Vorstellung, dass zwei ursprünglich parallele Geraden um ihre Verbindungsachse (Transversale) „gewunden“, also verdreht wurden.
Zum Nachweis, dass zwei Geraden  und
und  windschief sind, genügt es zu zeigen, dass ein Richtungsvektor von
,
ein Richtungsvektor von
und ein Verschiebungsvektor von einem Punkt auf
zu einem Punkt auf
linear
unabhängig sind. Äquivalent kann man zeigen, dass es keine Ebene gibt, die
beide Geraden enthält.
windschief sind, genügt es zu zeigen, dass ein Richtungsvektor von
,
ein Richtungsvektor von
und ein Verschiebungsvektor von einem Punkt auf
zu einem Punkt auf
linear
unabhängig sind. Äquivalent kann man zeigen, dass es keine Ebene gibt, die
beide Geraden enthält.
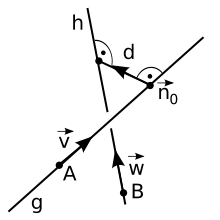
Berechnung des Abstandes zweier windschiefer Geraden
Die eindeutig bestimmte Strecke
kleinster
Länge,
die zwei windschiefe Geraden
und
verbindet, nennt man Gemeinlot
der beiden Geraden. Die Gerade, auf der das Gemeinlot liegt, nennt man die
Minimaltransversale der beiden Geraden. Diese ist diejenige eindeutig
bestimmte Gerade, welche im
rechten Winkel zu den beiden Geraden steht. Die Länge des Gemeinlots von
und
ist der Abstand  der beiden Geraden.
der beiden Geraden.
Gegeben seien die windschiefen Geraden
und
mit den Stützpunkten  und
und  bzw. den Stützvektoren
bzw. den Stützvektoren  und den Richtungsvektoren
und den Richtungsvektoren  und
und  .
Dann sind die Parameterformen
der Geradengleichungen
.
Dann sind die Parameterformen
der Geradengleichungen

 ,
,
wobei  gilt und die drei Vektoren
gilt und die drei Vektoren  linear unabhängig sein müssen.
linear unabhängig sein müssen.
Der Normalenvektor  ,
der senkrecht auf den beiden Richtungsvektoren
und
steht, lässt sich über das Kreuzprodukt
berechnen:
,
der senkrecht auf den beiden Richtungsvektoren
und
steht, lässt sich über das Kreuzprodukt
berechnen:
 und auf die Länge 1 bringen:
und auf die Länge 1 bringen:  .
.
Die Berechnung des Abstandes ist möglich durch die orthogonale Projektion des Verbindungsvektors der Stützpunkte auf den Normalenvektor. Dazu wird der Normalenvektor auf die Länge 1 gebracht. Der Abstand der beiden windschiefen Geraden beträgt dann
 .
.
Schreibweise mit Determinanten
Die beiden Geradengleichungen lauten ausgeschrieben
![{\displaystyle g\colon {\vec {x}}=\left({\begin{smallmatrix}a_{1}\\[0.7ex]a_{2}\\[0.7ex]a_{3}\end{smallmatrix}}\right)+r\left({\begin{smallmatrix}v_{1}\\[0.7ex]v_{2}\\[0.7ex]v_{3}\end{smallmatrix}}\right)}](/svg/f3160bfc87366a2eac81e4665f233f44189958a4.svg)
![{\displaystyle h\colon {\vec {x}}=\left({\begin{smallmatrix}b_{1}\\[0.7ex]b_{2}\\[0.7ex]b_{3}\end{smallmatrix}}\right)+s\left({\begin{smallmatrix}w_{1}\\[0.7ex]w_{2}\\[0.7ex]w_{3}\end{smallmatrix}}\right)\ \ \,r,s\in \mathbb {R} }](/svg/e993c87603d44aa990413dee0130fdc4c25de39e.svg) .
.
Der Abstand der beiden windschiefen Geraden mit Hilfe der Determinante det beträgt dann
 .
.
Bestimmung der Lotfußpunkte
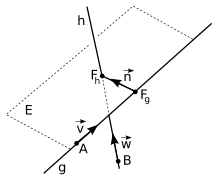
Den Lotfußpunkt
 erhält man, indem man eine Hilfsebene
erhält man, indem man eine Hilfsebene  aufstellt. Der Punkt
liegt auf der Hilfsebene,
und
spannen die Hilfsebene auf.
aufstellt. Der Punkt
liegt auf der Hilfsebene,
und
spannen die Hilfsebene auf.
 ,
,
wobei der Normalenvektor bestimmt wird durch
- .
Der Schnittpunkt von
und
ergibt den Lotfußpunkt :
 mit
mit 
Analog erhält man  mit der Ebene
mit der Ebene  und ihrem Schnittpunkt mit :
und ihrem Schnittpunkt mit :
 mit
mit 
Bei dieser Methode muss der Abstand  nicht berechnet werden.
nicht berechnet werden.
Die Lotfußpunkte können auch so bestimmt werden, dass man die beiden (vorerst unbekannten) Punkte ansetzt:
 und
und 
und dann einen entlang
verschiebt und ihn mit dem anderen zur Deckung bringt:
 .
.
Eine zeilenweise Auflösung ergibt ein System mit drei Variablen:  ,
,
 und
und  .
Die Fußpunkte sind dann:
.
Die Fußpunkte sind dann:
 und
und  .
.
Der Abstand
ergibt sich aus 
Bemerkung
- Im Taschenbuch der Mathematik von I.N. Bronstein und K.A. Semendjajew wird „kreuzend“ als Synonym für „windschief“ genannt.
Literatur
- M. Jeger, B. Eckmann: Einführung in die vektorielle Geometrie und lineare Algebra für Ingenieure und Naturwissenschafter. Birkhäuser Verlag, Basel / Stuttgart 1967.
- Joachim Köhler et al.: Analytische Geometrie und Abbildungsgeometrie in vektorieller Darstellung. Diesterweg-Verlag, Frankfurt am Main 1971, ISBN 3-425-05302-7
- Wilmut Kohlmann et al.: Lineare Algebra und Analytische Geometrie. Vieweg-Verlag, Braunschweig 1977, ISBN 3-594-10826-0
- Elisabeth und Friedrich Barth, Gert Krumbacher: Anschauliche Analytische Geometrie. Oldenbourg-Verlag, München 1997, ISBN 3-486-03500-2


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 23.10. 2022