Innere-Punkte-Verfahren
Innere-Punkte-Verfahren sind in der Optimierung eine Klasse von Algorithmen zur Lösung von Optimierungsaufgaben. Ihr Hauptanwendungsgebiet sind lineare oder quadratische Programme. Sie werden aber auch zur Lösung (allgemeiner) nichtlinearer Programme, semidefinierter Programme oder Komplementaritätsproblemen eingesetzt.
Im Vergleich zu den traditionelleren Active-Set-Methoden (z.B. Simplex-Verfahren) zeichnen sich Innere-Punkte-Verfahren durch bessere theoretische Eigenschaften (polynomiale Komplexität) und schnellere Konvergenz für sehr große dünnbesetzte Probleme aus. Ein Nachteil ist, dass sie vergleichbar ungeeignet zum Lösen einer Serie von Optimierungsaufgaben sind (was für viele Algorithmen der ganzzahligen Optimierung, wie z.B. Branch and Bound oder Schnittebenenverfahren, wichtig ist).
Aufgabenstellung
Im einfachsten Fall werden Innere-Punkte-Verfahren benutzt, um das lineare Problem

zu lösen. Dabei ist A eine  -Matrix,
und c, b sind jeweils n- bzw. m-dimensionale Vektoren. Die zulässige
Menge
-Matrix,
und c, b sind jeweils n- bzw. m-dimensionale Vektoren. Die zulässige
Menge  hat die Form eines Polyeders.
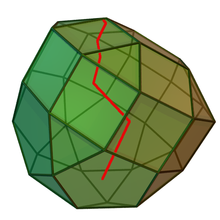
Aus der Theorie der linearen Optimierung ist bekannt, dass eine optimale Lösung
des Optimierungsproblems in einer der Ecken des Polyeders angenommen wird. Im
Gegensatz zum Simplex-Verfahren,
das sich entlang der Kanten von Ecke zu Ecke bewegt, versuchen
Innere-Punkte-Verfahren einen Pfad zum Optimum durch das „Innere“ des Polyeders
zu finden.
hat die Form eines Polyeders.
Aus der Theorie der linearen Optimierung ist bekannt, dass eine optimale Lösung
des Optimierungsproblems in einer der Ecken des Polyeders angenommen wird. Im
Gegensatz zum Simplex-Verfahren,
das sich entlang der Kanten von Ecke zu Ecke bewegt, versuchen
Innere-Punkte-Verfahren einen Pfad zum Optimum durch das „Innere“ des Polyeders
zu finden.
Geschichte
Logarithmische-Barriere-Verfahren wurden erstmals von Ragnar Anton Kittil Frisch (1956) beschrieben. Als wichtige frühe Referenz zum Thema Barriere-Verfahren gilt Fiacco und McCormick (1968). Sie galten damals jedoch als ineffizient und (durch das Logarithmieren sehr kleiner Zahlen) als numerisch instabil. Als Geburtsstunde der Inneren-Punkte-Verfahren gilt gemeinhin die Arbeit von Narendra Karmarkar von 1984, in der er zum ersten Mal einen polynomialen potentiell praktisch einsetzbaren Algorithmus für lineare Probleme beschreibt. Dieser Algorithmus wies schon viele Gemeinsamkeiten zu den modernen Verfahren auf, auch wenn die bedeutenden Durchbrüche, die Innere-Punkte-Verfahren zu einer echten Konkurrenz für das Simplex-Verfahren machten, erst in den 1990er Jahren geschahen (z.B. Mehrotra (1992)).
Herleitung
Vom heutigen Standpunkt aus gibt es verschiedene Wege, um
Innere-Punkte-Verfahren zu motivieren. Eine Möglichkeit ist über
Logarithmische Barrieren: Hierbei werden die Positivitätsbedingungen
 durch logarithmische Strafterme
durch logarithmische Strafterme  in der Zielfunktion ersetzt (hierbei ist
in der Zielfunktion ersetzt (hierbei ist  ein Parameter). Anstatt des Ursprungsproblems löst man also
ein Parameter). Anstatt des Ursprungsproblems löst man also

Für kleine Werte von  wird
wird  sehr groß, man versucht also durch Bestrafung kleiner x-Werte die Lösung des
Optimierungsproblems im Inneren der Menge der positiven Koordinaten zu halten.
Diese Bestrafung wird umso kleiner, je kleiner der Parameter
sehr groß, man versucht also durch Bestrafung kleiner x-Werte die Lösung des
Optimierungsproblems im Inneren der Menge der positiven Koordinaten zu halten.
Diese Bestrafung wird umso kleiner, je kleiner der Parameter  ist. Im Grenzwert
ist. Im Grenzwert  erwartet man, dass die Lösung des Barriereproblems gegen die Lösung des
Ursprungsproblems konvergiert. Das Barriereproblem ist ein (streng) konvexes
Problem, seine (einzige, globale) Lösung findet man durch Anwendung des lagrangeschen
Multiplikatorensatz als Lösung des (nichtlinearen) Gleichungssystems
erwartet man, dass die Lösung des Barriereproblems gegen die Lösung des
Ursprungsproblems konvergiert. Das Barriereproblem ist ein (streng) konvexes
Problem, seine (einzige, globale) Lösung findet man durch Anwendung des lagrangeschen
Multiplikatorensatz als Lösung des (nichtlinearen) Gleichungssystems

Hierbei entspricht die erste Zeile der Zulässigkeit bezüglich des Primalen
Problems, die zweite Zeile der Zulässigkeit bezüglich des Dualen Problems nach
der Einführung von Schlupfvariablen
und die dritte Zeile dem komplementären
Schlupf. Für jeden Wert  ist dieses Gleichungssystem eindeutig lösbar. Die Menge aller Lösungen für
verschiedene
beschreibt einen Pfad (den zentralen Pfad), der das Analytische
Zentrum des zulässigen Polyeders (für
ist dieses Gleichungssystem eindeutig lösbar. Die Menge aller Lösungen für
verschiedene
beschreibt einen Pfad (den zentralen Pfad), der das Analytische
Zentrum des zulässigen Polyeders (für  )
mit der Lösung des Ursprungsproblems (für
)
mit der Lösung des Ursprungsproblems (für  )
verbindet. Algorithmisch kann das Gleichungssystem per Newton-Verfahren
gelöst werden. In Innere-Punkte-Verfahren wird nach jeder Iteration des
Newton-Verfahrens der Parameter
reduziert. Durch geeignete Heuristiken wird sichergestellt, dass die Konvergenz
von
und die des Newton-Verfahrens synchron ablaufen.
)
verbindet. Algorithmisch kann das Gleichungssystem per Newton-Verfahren
gelöst werden. In Innere-Punkte-Verfahren wird nach jeder Iteration des
Newton-Verfahrens der Parameter
reduziert. Durch geeignete Heuristiken wird sichergestellt, dass die Konvergenz
von
und die des Newton-Verfahrens synchron ablaufen.
Eigenschaften
- Innere-Punkte-Verfahren sind global konvergent.
- Die Kurzschrittvariante des Innere-Punkte-Verfahrens braucht im
ungünstigsten Fall
 Iterationen, um die Lösung eines linearen Problems mit Genauigkeit
Iterationen, um die Lösung eines linearen Problems mit Genauigkeit  zu finden. Dies ist zurzeit die beste bekannte theoretische Schranke. Das
Kurzschrittverfahren ist in der Praxis anderen Varianten jedoch
unterlegen.
zu finden. Dies ist zurzeit die beste bekannte theoretische Schranke. Das
Kurzschrittverfahren ist in der Praxis anderen Varianten jedoch
unterlegen. - In der Praxis beobachtet man
 Iterationen.
Iterationen.
Algorithmus
- Wähle primale und duale Startvektoren
 .
. - Setze

- Reduziere
 .
. - Berechne die Newton-Richtung durch Lösen des linearen
Gleichungssystems:
 (dabei
sind
(dabei
sind  Diagonalmatrizen, auf
deren Diagonale
die Elemente der Vektoren x, s stehen, sowie
Diagonalmatrizen, auf
deren Diagonale
die Elemente der Vektoren x, s stehen, sowie  ).
). - Wähle eine Schrittweite
 ,
so dass
,
so dass  komponentenweise gilt. Einige Varianten des Innere-Punkte-Verfahrens stellen
weitere Bedingungen an
komponentenweise gilt. Einige Varianten des Innere-Punkte-Verfahrens stellen
weitere Bedingungen an  .
. - Setze

- Zurück zu Schritt 2
Varianten des Verfahrens und Umgebungen
Es gibt mehrere Varianten von Innere-Punkte-Verfahren, die sich im
Wesentlichen in der Wahl von  und
unterscheiden. Die wichtigsten sind Kurzschrittverfahren,
Langschrittverfahren und Predictor-Corrector-Verfahren
(Vorhersage und Korrektur). Um sie zu beschreiben, werden die folgenden
Umgebungen des zentralen Pfades benötigt:
und
unterscheiden. Die wichtigsten sind Kurzschrittverfahren,
Langschrittverfahren und Predictor-Corrector-Verfahren
(Vorhersage und Korrektur). Um sie zu beschreiben, werden die folgenden
Umgebungen des zentralen Pfades benötigt:

und

dabei ist  das Innere der zulässigen Menge. Der zentrale Pfad ist durch die Bedingung
das Innere der zulässigen Menge. Der zentrale Pfad ist durch die Bedingung  definiert. In der
definiert. In der  -Umgebung
wird die Euklidische
Norm der Abweichung des Vektors
-Umgebung
wird die Euklidische
Norm der Abweichung des Vektors  von
von  beschränkt, bei der
beschränkt, bei der  -Umgebung
wird lediglich verlangt, dass die Produkte
-Umgebung
wird lediglich verlangt, dass die Produkte  nicht zu klein werden.
nicht zu klein werden.
Die Varianten des Innere-Punkte-Verfahrens sind im Einzelnen:
- Kurzschrittverfahren: Für. geeignete Parameter
 wird
wird  und
und  gesetzt. Wenn der Startpunkt in
gesetzt. Wenn der Startpunkt in  ist, so gilt dies auch für alle weiteren Iterationspunkte.
ist, so gilt dies auch für alle weiteren Iterationspunkte. - Langschrittverfahren:
 werden gewählt. Es wird
werden gewählt. Es wird  mit
mit  gesetzt und
so gewählt, dass zusätzlich
gesetzt und
so gewählt, dass zusätzlich  gilt.
gilt. - Predictor-Corrector-Verfahren: Es wird zuerst
 gewählt, und das maximale
für diesen Fall bestimmt (Predictor). Dieses
liefert einen Schätzwert für das optimale ,
das nun im zweiten Schritt gewählt wird. Im zweiten Schritt wird außerdem
versucht, den Linearisierungsfehler der dritten Gleichung (
gewählt, und das maximale
für diesen Fall bestimmt (Predictor). Dieses
liefert einen Schätzwert für das optimale ,
das nun im zweiten Schritt gewählt wird. Im zweiten Schritt wird außerdem
versucht, den Linearisierungsfehler der dritten Gleichung ( )
durch das Newton-Verfahren zu korrigieren. Im
Predictor-Corrector-Verfahren wird das obige Newton-Gleichungssystem
für zwei verschiedene rechte Seiten gelöst. Es ist möglich, dies sehr
effizient zu implementieren (Cholesky-Zerlegung).
)
durch das Newton-Verfahren zu korrigieren. Im
Predictor-Corrector-Verfahren wird das obige Newton-Gleichungssystem
für zwei verschiedene rechte Seiten gelöst. Es ist möglich, dies sehr
effizient zu implementieren (Cholesky-Zerlegung).
Das Predictor-Corrector-Verfahren ist den anderen Varianten in der Praxis überlegen, ist jedoch schwerer zu analysieren und besitzt schlechtere theoretische Eigenschaften.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 15.03. 2025