Weingartenabbildung
Die Weingartenabbildung (nach dem deutschen Mathematiker Julius Weingarten),
auch Formoperator genannt, ist eine Funktion aus der Theorie der Flächen
im dreidimensionalen
euklidischen
Raum ( ),
einem Teilgebiet der klassischen Differentialgeometrie.
),
einem Teilgebiet der klassischen Differentialgeometrie.
Vorbereitung
Eine reguläre Fläche sei durch die Parameterdarstellung

gegeben. Dabei sei  mindestens zweimal stetig differenzierbar und in jedem Punkt
mindestens zweimal stetig differenzierbar und in jedem Punkt  habe die Ableitung
habe die Ableitung  ,
eine lineare Abbildung von
,
eine lineare Abbildung von  nach ,
vollen Rang. Das Bild dieser linearen Abbildung ist dann ein zweidimensionaler
Unterraum des ,
der Tangentialraum der Fläche im Punkt
nach ,
vollen Rang. Das Bild dieser linearen Abbildung ist dann ein zweidimensionaler
Unterraum des ,
der Tangentialraum der Fläche im Punkt  .
Dabei denkt man sich die Bildvektoren im Punkt
angeheftet. Der Tangentialraum wird von den beiden Vektoren
.
Dabei denkt man sich die Bildvektoren im Punkt
angeheftet. Der Tangentialraum wird von den beiden Vektoren
 und
und
aufgespannt. (Hierbei bezeichnen  und
und  die Einheitsvektoren der Standardbasis
des .)
die Einheitsvektoren der Standardbasis
des .)
Die Einheitsnormale
 im Punkt
der Fläche kann mit Hilfe des Vektorprodukts
berechnet werden:
im Punkt
der Fläche kann mit Hilfe des Vektorprodukts
berechnet werden:

Somit ist  eine differenzierbare Abbildung vom Parameterbereich
eine differenzierbare Abbildung vom Parameterbereich  in den Vektorraum .
Den Bildvektor
denkt man sich angeheftet an den Punkt .
Die Ableitung
in den Vektorraum .
Den Bildvektor
denkt man sich angeheftet an den Punkt .
Die Ableitung  im Punkt
ist eine lineare Abbildung von
nach .
Aus der Bedingung, dass
ein Einheitsvektor ist, folgt, dass für jedes Parameterpaar
das Bild der Abbildung
im Tangentialraum der Fläche im Punkt
liegt und somit im Bild der Abbildung
Da
injektiv ist, existiert die Umkehrabbildung
im Punkt
ist eine lineare Abbildung von
nach .
Aus der Bedingung, dass
ein Einheitsvektor ist, folgt, dass für jedes Parameterpaar
das Bild der Abbildung
im Tangentialraum der Fläche im Punkt
liegt und somit im Bild der Abbildung
Da
injektiv ist, existiert die Umkehrabbildung  als Abbildung auf dem Tangentialraum im Punkt
als Abbildung auf dem Tangentialraum im Punkt  .
.
Definition
Man kann nun die Weingartenabbildung als lineare Abbildung im Parameterbereich (klassische Sichtweise) oder auf dem Tangentialraum (moderne Sichtweise) definieren.
Im Parameterbereich
Die Abbildung
bildet den
auf den Tangentialraum der Fläche im Punkt
ab. Die Abbildung
bildet diesen Tangentialraum wieder auf den
ab. Die durch Verkettung und Vorzeichenwechsel daraus entstehende lineare
Abbildung

von
nach
heißt Weingartenabbildung an der Stelle .
Auf der Fläche
Die Abbildung
bildet einen Vektor des Tangentialraums der Fläche im Punkt
in den
ab. Die Abbildung
bildet den Bildvektor wieder in den Tangentialraum ab. Die durch Verkettung und
Vorzeichenwechsel daraus entstehende lineare Abbildung

bildet den Tangentialraum im Punkt
auf sich ab und heißt Weingartenabbildung am Punkt .
Es gilt also
 für
für  .
.
Koordinatendarstellung
Die beiden Versionen der Weingartenabbildung sind auf völlig verschiedenen
Vektorräumen definiert. Wählt man jedoch im Parameterbereich die Standardbasis
und im Tangentialraum die Basis  ,
,
 ,
so stimmen die zugehörigen Abbildungsmatrizen
,
so stimmen die zugehörigen Abbildungsmatrizen

überein. Sie sind durch die Gleichungen


charakterisiert. In Einsteinscher
Summenkonvention, mit  ,
,
 ,
,
 ,
,
 und unter Weglassung des Arguments:
und unter Weglassung des Arguments:

Zusammenhang mit der zweiten Fundamentalform
Für jedes Parameterpaar
ist die erste
Fundamentalform  ein Skalarprodukt im
und die zweite
Fundamentalform
ein Skalarprodukt im
und die zweite
Fundamentalform  eine symmetrische Bilinearform. Diese sind durch die Weingartenabbildung wie
folgt verbunden: Für Vektoren
eine symmetrische Bilinearform. Diese sind durch die Weingartenabbildung wie
folgt verbunden: Für Vektoren  gilt
gilt
 .
.
Für die zugehörigen Matrixdarstellungen gilt in Einsteinscher Summenkonvention
und

Eigenschaften
- Die Weingartenabbildung
 ist selbstadjungiert
bezüglich der ersten Fundamentalform
ist selbstadjungiert
bezüglich der ersten Fundamentalform  ,
das heißt, für alle
gilt
,
das heißt, für alle
gilt
In jedem Punkt der Fläche existiert deshalb eine Basis aus Eigenvektoren von,
die orthonormal bezüglich
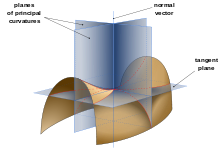
ist. - Die Richtungen der Eigenvektoren heißen Hauptkrümmungsrichtungen.
- Die Eigenwerte der Weingartenabbildung geben die Hauptkrümmungen der Fläche an.
- Für einen Vektor
 beschreibt
beschreibt  die Änderung der Flächennormalen in dieser Richtung an diesem Punkt.
die Änderung der Flächennormalen in dieser Richtung an diesem Punkt. - Die Weingartenabbildung ist die Ableitung der Gauß-Abbildung.
Beispiel
Dem Beispiel aus den Artikeln erste
Fundamentalform und zweite
Fundamentalform folgend, wird wieder die Oberfläche einer Kugel vom Radius
 betrachtet. Diese Fläche wird wieder durch
betrachtet. Diese Fläche wird wieder durch
 parametrisiert.
parametrisiert.
Die Matrixdarstellung der ersten Fundamentalform besteht aus den Komponenten
 ,
,
 ,
sowie
,
sowie  .
.
Die Matrixdarstellung der zweiten Fundamentalform besteht aus den Komponenten
 ,
,
 ,
sowie
,
sowie  .
.
Beide sind durch die Gleichung  miteinander verbunden. Diese liefert durch Ausschreiben der Einsteinschen
Summenkonvention folgende vier Gleichungen:
miteinander verbunden. Diese liefert durch Ausschreiben der Einsteinschen
Summenkonvention folgende vier Gleichungen:




Durch Einsetzen der Komponenten der Matrixdarstellungen erhält man die Komponenten der Weingartenabbildung:


Alternativ hätte auch die explizite Formel  genutzt werden können. Dazu hätte allerdings die Matrix der ersten
Fundamentalform invertiert werden müssen, um die
genutzt werden können. Dazu hätte allerdings die Matrix der ersten
Fundamentalform invertiert werden müssen, um die  zu erhalten.
zu erhalten.
Literatur
- Wolfgang Kühnel: Differentialgeometrie. Kurven – Flächen – Mannigfaltigkeiten. 4. überarbeitete Auflage. Vieweg, Wiesbaden 2007, ISBN 978-3-8348-0411-2.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 04.09. 2020