Parametrischer Oszillator
Ein parametrischer Oszillator ist ein harmonischer Oszillator mit zeitabhängigen Parametern (Eigenfrequenz und Dämpfung[Anm 1]). Einem Oszillator kann auf diese Weise Energie zugeführt werden, um die Amplitude der Schwingung zu vergrößern. Die Methode der Energiezufuhr wird parametrische Anregung genannt, die Bewegung parametererregte oder auch rheolineare Schwingung. Ein Beispiel ist das Schwungholen bei einer Schaukel durch periodisches Heben und Senken des Schwerpunkts parallel zur Aufhängung.[Anm 2]
Ein Merkmal einer rein parametrisch erzeugten Schwingung ist, dass sie, im Unterschied zu einer erzwungenen Schwingung, ohne eine anfängliche Auslenkung aus der Ruhelage nicht entstehen kann.
Technische Systeme mit zeitabhängigen Parametern finden sich beispielsweise im Turbomaschinen- und Hubschrauberbau. Parametrische Oszillatoren werden in einer Reihe von technischen Systemen eingesetzt, besonders in der Elektrotechnik, beispielsweise beim Bau von rauscharmen Verstärkern. Weiter können sie zur Frequenzwandlung eingesetzt werden. Ein optisch parametrischer Oszillator kann beispielsweise eine eingestrahlte Laserwelle in zwei Strahlungen geringerer Frequenz umwandeln.
Definition
Ein Oszillator mit rein parametrischer Anregung lässt sich durch folgende homogene Differentialgleichung beschreiben:

Die zeitabhängigen Funktionen  und
und  sind Parameter des Systems. Die Parameter haben die Eigenschaft, dass sie reell
sind, nicht von dem Zustand des Oszillators abhängen und sich periodisch
verändern. Es lässt sich zeigen, dass sich beide Parameter zu einer
zeitabhängigen Anregungsfunktion zusammenfassen lassen. Eine solche
Anregungsfunktion nennt man Pumpfunktion. Die Schaltung oder Mechanismus, der
die Parameter verändert heißt Pumpe.
sind Parameter des Systems. Die Parameter haben die Eigenschaft, dass sie reell
sind, nicht von dem Zustand des Oszillators abhängen und sich periodisch
verändern. Es lässt sich zeigen, dass sich beide Parameter zu einer
zeitabhängigen Anregungsfunktion zusammenfassen lassen. Eine solche
Anregungsfunktion nennt man Pumpfunktion. Die Schaltung oder Mechanismus, der
die Parameter verändert heißt Pumpe.
Merkmal einer solchen Anregung ist, dass bei einem Oszillator, der mit einer
Anfangsamplitude von Null startet, die Amplitude Null bleibt, denn für die
Anfangsbedingungen  erhält man immer
erhält man immer  .
Da die Verstärkung jedoch schon bei winzigsten, unbeabsichtigten Auslenkungen
funktioniert, ist dieser Fall in der Realität nicht zu beobachten.
.
Da die Verstärkung jedoch schon bei winzigsten, unbeabsichtigten Auslenkungen
funktioniert, ist dieser Fall in der Realität nicht zu beobachten.
Daher wird die parametrische Anregung vielfach durch eine Zwangserregung ergänzt, sodass die Differentialgleichung inhomogen wird. Man erhält also zusätzlich zu zeitabhängigen Parametern eine unabhängige externe Kraft und somit eine kombinierte Zwangs- und Parametererregung.

Von praktischem Interesse ist insbesondere der einfachste Resonanzfall, bei dem sich die Parameter mit doppelter Eigenfrequenz des Oszillators verändern. Dann schwingt der Oszillator phasenstarr mit der parametrischen Veränderung und absorbiert dabei Energie proportional zu der Energie, die er bereits besitzt. Ohne einen Mechanismus, der dieses Anwachsen kompensiert, wächst die Amplitude der Oszillation somit exponentiell an. Ein eindrucksvolles Anwendungsbeispiel ist der unten angesprochene „schwingende Weihrauchkessel“ in der Kathedrale von Santiago de Compostela, dem Ende des Jakobswegs in Nordspanien.
Bei Systemen mit mehreren Freiheitsgraden haben die Parameter Matrizenform und die abhängigen Variablen werden in einem Vektor zusammengefasst.
Geschichte
Die ersten Beobachtungen stammen von Michael Faraday, der im Jahr 1831 Oberflächenwellen in einem Weinglas beschrieben hat, das zum „Singen“ angeregt wurde. Er stellte fest, dass die Schwingungen des Weinglases von Kräften mit doppelter Frequenz erregt wurden. Im Jahr 1859 hat dann Franz Melde parametererregte Schwingungen in einer Saite erzeugt, indem er eine Stimmgabel verwendete, um die Spannung der Saite periodisch mit doppelter Resonanzfrequenz zu verändern. Eine Beschreibung von parametrischer Anregung als generelles Phänomen wurde erstmals von Rayleigh in den Jahren 1883 und 1887 verfasst.
George William Hill stieß 1877 auf eine spezielle DGL mit veränderlichen Parametern, als er Störungen ermittelte, die die Mondbahn durch den Einfluss der Sonne erfährt.
Einer der Ersten, der das Konzept auf elektrische Schaltungen angewendete, war George Francis FitzGerald, der 1892 versuchte, Schwingungen in LC-Gliedern anzuregen, indem er mit einem Dynamo als Pumpe die Induktivität des Schwingkreises veränderte.
Parametrische Verstärker wurden das erste Mal in den Jahren 1913 bis 1915 für eine radioübertragene Telefonverbindung von Berlin nach Wien und Moskau verwendet. Das Potential der Technologie für zukünftige Anwendungen wurde schon damals erkannt, beispielsweise von Ernst Alexanderson. Die ersten parametrischen Verstärker funktionierten durch Veränderung der Induktivität. Seitdem sind weitere Methoden, wie die Kapazitätsdiode, Klystronröhren, Josephson-Kontakte und optische Methoden entwickelt worden.
Mathematische Beschreibung
Zusammenfassung der Parameter zu einer Anregungsfunktion
Wir beginnen mit obenstehender Differentialgleichung:

Um beide zeitabhängige Faktoren in der Differentialgleichung zu einer Pumpfunktion zusammenzufassen, lässt sich zunächst eine Variablentransformation durchführen, um den geschwindigkeitsabhängigen Term zu eliminieren. Wir setzen somit:

Nach zweimaliger Ableitung und Einsetzen in die ursprüngliche Gleichung entsteht

mit

Die obenstehende Differentialgleichung, bei der sich  periodisch verändert, wird Hillsche
Differentialgleichung genannt.
periodisch verändert, wird Hillsche
Differentialgleichung genannt.
Die Anregung wird meist als Abweichung von einem zeitlichen Mittel aufgefasst

wobei die Konstante  der gedämpften Schwingfrequenz des Oszillators entspricht, also
der gedämpften Schwingfrequenz des Oszillators entspricht, also

Die zeitabhängige Funktion  wird Pumpfunktion genannt. Jede Art von parametrischer Anregung lässt sich also
immer durch folgende Differentialgleichung beschreiben
wird Pumpfunktion genannt. Jede Art von parametrischer Anregung lässt sich also
immer durch folgende Differentialgleichung beschreiben

Lösung für eine sinusförmige Anregung mit doppelter Frequenz
Wir betrachten die obenstehende Differentialgleichung

Wir nehmen an, dass sich die Pumpfunktion
schreiben lässt als

wobei die halbe Pumpfrequenz  ungefähr der Schwingfrequenz entspricht. Dieser Spezialfall der hillschen
Differentialgleichung wird mathieusche
Differentialgleichung genannt. Eine exakte Übereinstimmung der Frequenzen
ist für die Lösung jedoch nicht notwendig, da sich die Schwingung dem Pumpsignal
anpasst. Nach dem Satz
von Floquet lässt sich die Lösung der Differentialgleichung schreiben als
ungefähr der Schwingfrequenz entspricht. Dieser Spezialfall der hillschen
Differentialgleichung wird mathieusche
Differentialgleichung genannt. Eine exakte Übereinstimmung der Frequenzen
ist für die Lösung jedoch nicht notwendig, da sich die Schwingung dem Pumpsignal
anpasst. Nach dem Satz
von Floquet lässt sich die Lösung der Differentialgleichung schreiben als

Die Amplituden  und
und  sind dabei zeitabhängig. Für eine parametrische Anregung gilt jedoch
üblicherweise, dass sich die Amplituden langsamer verändern als die Sinus
beziehungsweise Cosinusterme der Lösung. Anders ausgedrückt geschieht die
Veränderung der Schwingungsamplitude langsamer als die Schwingung selbst. Setzt
man diese Lösung in die Differentialgleichung ein und behält nur Terme erster
Ordnung in
sind dabei zeitabhängig. Für eine parametrische Anregung gilt jedoch
üblicherweise, dass sich die Amplituden langsamer verändern als die Sinus
beziehungsweise Cosinusterme der Lösung. Anders ausgedrückt geschieht die
Veränderung der Schwingungsamplitude langsamer als die Schwingung selbst. Setzt
man diese Lösung in die Differentialgleichung ein und behält nur Terme erster
Ordnung in  ,
so erhält man zwei gekoppelte Gleichungen
,
so erhält man zwei gekoppelte Gleichungen


Um dieses Gleichungssystem zu entkoppeln, lässt sich eine weitere Variablentransformation durchführen


und erhält dadurch die Gleichungen


mit den Konstanten



Die Konstante  wird Verstimmung genannt. Die Differentialgleichung für
wird Verstimmung genannt. Die Differentialgleichung für  hängt dabei nicht von
hängt dabei nicht von  ab. Mit einer linearen Näherung lässt sich zeigen, dass sich
exponentiell dem Gleichgewichtspunkt
ab. Mit einer linearen Näherung lässt sich zeigen, dass sich
exponentiell dem Gleichgewichtspunkt  annähert. Anders ausgedrückt, der parametrische Oszillator koppelt sich
phasenstarr an das Pumpsignal. Setzt man
annähert. Anders ausgedrückt, der parametrische Oszillator koppelt sich
phasenstarr an das Pumpsignal. Setzt man  ,
womit man annimmt, dass sich die Kopplung eingestellt hat, wird die
Differentialgleichung für die Amplitude zu
,
womit man annimmt, dass sich die Kopplung eingestellt hat, wird die
Differentialgleichung für die Amplitude zu


Die Lösung dieser Gleichung ist eine exponentielle Funktion. Damit die
Amplitude von  exponentiell anwächst muss demnach gelten
exponentiell anwächst muss demnach gelten

Das größte Wachstum der Amplitude erhält man für den Fall  .
Die entsprechende Schwingung der untransformierten Variable
.
Die entsprechende Schwingung der untransformierten Variable  muss jedoch nicht anwachsen. Ihre Amplitude
muss jedoch nicht anwachsen. Ihre Amplitude  ist durch folgende Gleichung gegeben:
ist durch folgende Gleichung gegeben:

Man sieht, das ihr Verhalten abhängig davon ist, ob  größer, kleiner beziehungsweise gleich dem Zeitintegral des
geschwindigkeitsabhängigen Parameters ist.
größer, kleiner beziehungsweise gleich dem Zeitintegral des
geschwindigkeitsabhängigen Parameters ist.
Veranschaulichung mit Fourierkomponenten
Da die obenstehende mathematische Herleitung kompliziert und trickreich wirken kann, ist es vielfach hilfreich eine anschaulichere Herleitung zu betrachten. Dazu schreiben wir die Differentialgleichung in der Form
 ,
,
Wir nehmen an, dass die Pumpfunktion eine sinusförmige Funktion doppelter Frequenz ist, sowie dass die Schwingung bereits eine entsprechende Form besitzt, also


Für das Produkt der beiden sinusförmigen Funktionen lässt sich eine trigonometrische Identität benutzen, sodass man zwei Pumpsignale erhält.

Im Fourierraum
ist die Multiplikation eine Überlagerung der Fouriertransformierten  und
und  .
Die positive Verstärkung kommt daher, dass die Komponente
.
Die positive Verstärkung kommt daher, dass die Komponente  von
und die Komponente
von
und die Komponente  von
zu einem Anregungssignal mit
von
zu einem Anregungssignal mit  werden und analog mit entgegengesetztem Vorzeichen. Dies erklärt, warum die
Pumpfrequenz in der Umgebung von
werden und analog mit entgegengesetztem Vorzeichen. Dies erklärt, warum die
Pumpfrequenz in der Umgebung von  ,
der doppelten Resonanzfrequenz des Oszillators liegen muss. Eine Pumpfrequenz
die sich stark unterscheidet, würde nicht koppeln, also nicht in einer eine
positive Rückkopplung zwischen den Komponenten
und
resultieren.
,
der doppelten Resonanzfrequenz des Oszillators liegen muss. Eine Pumpfrequenz
die sich stark unterscheidet, würde nicht koppeln, also nicht in einer eine
positive Rückkopplung zwischen den Komponenten
und
resultieren.
Stabilität und Resonanz
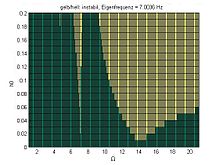
Den Fall bei dem die Änderung der Parameter die Amplitude der Schwingung vergrößert bezeichnet man als parametrische Resonanz. Für Anwendungen ist es häufig interessant, ob eine Schwingung stabil ist. In dem betrachteten Fall eines harmonischen Oszillators bedeutet stabil, dass die Energie und damit die Schwingungsamplitude nicht gegen unendlich divergiert. Stabile Schwingungen sind demnach gebunden, instabile ungebunden. Die Stabilität eines Systems lässt sich in einer Stabilitätskarte veranschaulichen (siehe beispielhafte Darstellung rechts). Im Folgenden werden zwei Methoden zur Stabilitätsuntersuchung erläutert.
Stabilitätsuntersuchung nach Hill
Ausgangspunkt ist eine Ansatzfunktion der Form

wobei der erste Faktor einen Eigenwert beinhaltet der die Stabilität kennzeichnet (s.u.) und der zweite Faktor periodisch mit der Parameterfrequenz ist. Als komplexe Fourierreihe hat er die folgende Gestalt

Die (periodischen) Systemmatrizen werden ebenfalls in einer Fourierreihe
entwickelt. Das Prinzip der harmonischen Balance
führt auf ein Eigenwertproblem mit Matrizen der Größe [K(2N+1) ×
K(2N+1)] (K = Freiheitsgrade, N = Zahl der Fourierglieder)
mit den für die Stabilitätsbetrachtung interessierenden Eigenwerten  (die Anzahl der Eigenwerte entsprechend den Matrizengrößen).
(die Anzahl der Eigenwerte entsprechend den Matrizengrößen).
![{\displaystyle \det[\lambda ^{2}+\lambda \cdot {\overline {p_{1}}}+{\overline {p_{2}}}]=0}](/svg/a387fc3c7d6c3cf9abf77ecc7e64bbff03dac55e.svg)
Die Größe des Realteils des Eigenwerts entscheidet dabei über die Stabilität.
Stabilitätsuntersuchung nach Floquet
Eine weitere Möglichkeit zur Bestimmung der Stabilitätsgrenzen ist die
Stabilitätsuntersuchung nach Gaston Floquet.
Dabei wird die DGL bei 2K gegebenen linear unabhängigen reellen
Anfangsbedingungen (K = Freiheitsgrade) numerisch, in einfachen Fällen auch
analytisch über eine Parameterperiode integriert und aus den gewonnenen Werten
eine 2K×2K-Übertragungsmatrix  generiert, deren im Normalfall konjugiert komplexe
Eigenwerte Stabilität oder Instabilität kennzeichnen (sog. floquetsches Eigenwertproblem). In
der dargestellten Stabilitätskarte rechts wird das Floquet-Verfahren auf die DGL
des ungedämpften Rüttelpendels bzw. die mathieusche DGL angewandt. Auf den
Grenzlinien zwischen stabilem und instabilem Bereich (hier gelb dargestellt)
liegen periodische Lösungen vor. Im Stabilitätsbereich geht die Lösung nach
einer gewissen Zeit gegen Null. Man erkennt für diese DGL ferner, dass bei
fehlender Dämpfung für die Stabilitätsbetrachtung neben der Erregung mit
doppelter und einfacher Eigenfrequenz auch die Erregung mit 2/3 (hier nicht mehr
zu erkennen 2/4, 2/5 usw.) der Eigenfrequenz noch eine gewisse mathematische
Bedeutung hat.
generiert, deren im Normalfall konjugiert komplexe
Eigenwerte Stabilität oder Instabilität kennzeichnen (sog. floquetsches Eigenwertproblem). In
der dargestellten Stabilitätskarte rechts wird das Floquet-Verfahren auf die DGL
des ungedämpften Rüttelpendels bzw. die mathieusche DGL angewandt. Auf den
Grenzlinien zwischen stabilem und instabilem Bereich (hier gelb dargestellt)
liegen periodische Lösungen vor. Im Stabilitätsbereich geht die Lösung nach
einer gewissen Zeit gegen Null. Man erkennt für diese DGL ferner, dass bei
fehlender Dämpfung für die Stabilitätsbetrachtung neben der Erregung mit
doppelter und einfacher Eigenfrequenz auch die Erregung mit 2/3 (hier nicht mehr
zu erkennen 2/4, 2/5 usw.) der Eigenfrequenz noch eine gewisse mathematische
Bedeutung hat.
Parametrische Verstärker
Anwendungen
Parametrische Oszillatoren als rauscharme Verstärker (englisch Low Noise Amplifier), kommen besonders im Radio- und Mikrowellenbereich vor. Ein Schwingkreis mit Kapazitätsdiode wird angeregt, indem ihre Kapazität periodisch verändert wird. YAG-Wellenleiter in der Mikrowellentechnik arbeiten nach dem gleichen Prinzip.
Vorteile des Einsatzes parametrischer Verstärker sind
- ihre hohe Sensitivität
- ihr geringes thermisches Rauschen, weil eine Reaktanz (und kein Widerstand) verändert wird
Funktionsprinzip
Ein parametrischer Verstärker wird als Frequenzmischer betrieben. Die Verstärkung dieser Signalmischung zeigt sich im Verstärkungsfaktor des Ausgangs. Das schwache Eingangssignal wird mit dem starken Oszillatorsignal gemischt und das resultierende Signal wird in den nachfolgenden Empfängerstufen verwendet.
Parametrische Verstärker funktionieren ebenfalls durch Veränderung der Schwingungsparameter. Es lässt sich intuitiv für einen Verstärker mit variabler Kapazität wie mittels folgenden Relationen verstehen. Die Ladung des Kondensators ist

und daher die am Kondensator anliegende Spannung

Wenn ein Kondensator aufgeladen wird, bis die Spannung jener des schwachen Eingangssignals entspricht, und dann die Kapazität des Kondensators reduziert wird, beispielsweise indem die Platten eines Plattenkondensators weiter voneinander entfernt werden, so erhöht sich die anliegende Spannung und somit das schwache Signal verstärkt. Wenn der Kondensator eine Kapazitätsdiode ist, so kann das Bewegen der Platten, also eine Änderung der Kapazität durch einfaches Anlegen einer zeitabhängigen Spannung geschehen. Diese antreibende Spannung wird auch Pumpspannung genannt.
Das resultierende Ausgangssignal enthält unterschiedliche Frequenzen, die der
Summe und Differenz von Eingangssignal  und Ausgangssignal
und Ausgangssignal  entsprechen, also
entsprechen, also  und
und  .
.
Praktisch braucht ein parametrischer Oszillator also die folgenden Anschlüsse:
- Masseanschluss
- Pumpspannung
- Ausgang
- teilweise einen Vierten zur Einstellung der Parameter
Ein parametrischer Verstärker braucht zusätzlich einen Eingang für das zu verstärkende Signal. Da eine Kapazitätsdiode nur zwei Anschlüsse besitzt, kann sie nur im Zusammenspiel mit einem LC-Netzwerk verwendet werden. Dies kann als Transimpedanzverstärker, als Wanderfeldröhrenverstärker oder mit Hilfe eines Zirkulators realisiert werden.
„Aufschaukeln“: Der schwingende Weihrauchkessel
Ein elementares Beispiel: Der von der Kirchendecke herabhängende „schwingende Weihrauchkessel“ der Kathedrale von Santiago de Compostela wird von einem Team von sog. „Botafumeiros“ zu parametrischer Resonanz „aufgeschaukelt“, wobei das Prinzip der „doppelten Frequenz“ ausgenutzt wird: Immer beim Nulldurchgang wird die Pendellänge des Kessels „durch Hochziehen“ systematisch verkürzt.
Anmerkungen
- ↑ Der Parameter der ersten Ableitung ist dabei, auch wenn er vielfach als Dämpfung bezeichnet wird, nicht gleichbedeutend mit dem Vorhandensein von Dissipation
- ↑
Beachte: In Realität werden Schaukeln vielfach
nicht ausschließlich parametrisch angeregt, siehe dazu:
William B. Case: The pumping of a swing from the standing position. In: American Journal of Physics. 64, 1996, S. 215–220


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 28.01. 2026