Lagrange-Multiplikator
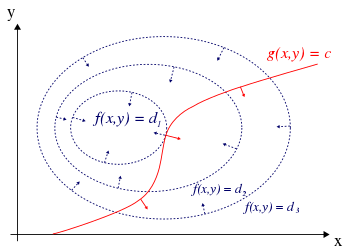
 erfüllt ist. Die blauen Linien sind Höhenlinien
erfüllt ist. Die blauen Linien sind Höhenlinien  für verschiedene Werte von
für verschiedene Werte von  .
An dem Punkt, an dem
.
An dem Punkt, an dem  unter der Nebenbedingung
unter der Nebenbedingung  maximal ist, verläuft
tangential zur Höhenlinie
maximal ist, verläuft
tangential zur Höhenlinie  .
Dort sind die Gradienten
der Funktionen
und
.
Dort sind die Gradienten
der Funktionen
und  ,
dargestellt durch blaue bzw. rote Pfeile, kollinear.
,
dargestellt durch blaue bzw. rote Pfeile, kollinear.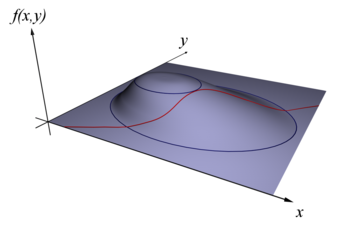 auf der Höhenachse abgetragen sind.
auf der Höhenachse abgetragen sind.Das Verfahren der Lagrange-Multiplikatoren (nach Joseph-Louis Lagrange) ist in der mathematischen Optimierung eine Methode zur Lösung von Optimierungsproblemen mit Nebenbedingungen. Ein Optimierungsproblem mit Nebenbedingungen ist die Aufgabe, ein lokales Extremum einer Funktion in mehreren Veränderlichen mit einer oder mehreren Nebenbedingungen zu finden, wobei die Nebenbedingungen durch Setzen von Funktionen auf gegebene Werte definiert seien. Diese Methode führt eine neue unbekannte skalare Variable für jede Nebenbedingung ein, einen Lagrange-Multiplikator, und definiert eine Linearkombination, die die Multiplikatoren als Koeffizienten einbindet. Die Lösungen der ursprünglichen Optimierungsaufgabe können dann unter gewissen Voraussetzungen als kritische Punkte dieser sogenannten Lagrange-Funktion bestimmt werden.
Beschreibung
Zunächst betrachten wir den zweidimensionalen Fall mit einer Nebenbedingung.
Nehmen wir an, wir wollen eine Funktion  maximieren, wobei die Nebenbedingung
(
maximieren, wobei die Nebenbedingung
( konstant) einzuhalten ist. Die Nebenbedingung filtert bestimmte Punkte der
x-y-Ebene heraus, die zusammengenommen Kurven bilden. Für unsere Betrachtung
nehmen wir an, die Nebenbedingung sei so geartet, dass sie durch eine einzelne
Kurve dargestellt werden kann (siehe nebenstehendes Bild, rote Kurve). Wenn wir
uns auf dieser Kurve bewegen, berühren
oder schneiden wir Höhenlinien
von .
Wir sehen nun, dass wir immer nur dann ein Maximum
der Funktion
erreichen, wenn unsere Bewegung auf der Kurve
tangential
zur Höhenlinie
verläuft: Andernfalls können wir durch Vorwärts- oder Rückwärtsbewegung auf der
Kurve
den Funktionswert von
noch weiter vergrößern, ohne die Nebenbedingung zu verletzen.
konstant) einzuhalten ist. Die Nebenbedingung filtert bestimmte Punkte der
x-y-Ebene heraus, die zusammengenommen Kurven bilden. Für unsere Betrachtung
nehmen wir an, die Nebenbedingung sei so geartet, dass sie durch eine einzelne
Kurve dargestellt werden kann (siehe nebenstehendes Bild, rote Kurve). Wenn wir
uns auf dieser Kurve bewegen, berühren
oder schneiden wir Höhenlinien
von .
Wir sehen nun, dass wir immer nur dann ein Maximum
der Funktion
erreichen, wenn unsere Bewegung auf der Kurve
tangential
zur Höhenlinie
verläuft: Andernfalls können wir durch Vorwärts- oder Rückwärtsbewegung auf der
Kurve
den Funktionswert von
noch weiter vergrößern, ohne die Nebenbedingung zu verletzen.
Ein bekanntes Beispiel kann den Wetterkarten
mit ihren Höhenlinien für Temperaturen und Druck entnommen werden. Die Extrema
unter der Nebenbedingung treten dort auf, wo sich beim Überlagern der Karten
Linien berühren. Geometrisch übersetzen wir die Tangentenbedingung, indem wir
sagen, dass die Gradienten
von
und
beim Maximum parallele
Vektoren sind,
wobei der Gradient von
nicht verschwinden darf.
Wir suchen also Punkte  mit ,
an denen
mit ,
an denen  und
und
 .
.
Dabei wurden die folgenden Abkürzungen bzw. Definitionen für die zugehörigen Gradienten benutzt:

und

Der konstante Lagrange-Multiplikator  wird dabei benötigt, weil die beiden Gradienten zwar parallel sein sollen, aber
als Vektoren unterschiedlich lang sein können. Um alle genannten Bedingungen zu
einer Gleichung zusammenzufassen, ist es nützlich, die folgende
Lagrange-Funktion zu verwenden:
wird dabei benötigt, weil die beiden Gradienten zwar parallel sein sollen, aber
als Vektoren unterschiedlich lang sein können. Um alle genannten Bedingungen zu
einer Gleichung zusammenzufassen, ist es nützlich, die folgende
Lagrange-Funktion zu verwenden:

Die Lösung des oben beschriebenen Optimierungsproblems mit einer Nebenbedingung entspricht jetzt einem lokalen Extremum der Lagrange-Funktion. Dieses Extremum kann über den Gradienten der Lagrange-Funktion berechnet werden:

Die  -
und die
-
und die  -Komponente
dieser Gleichung entsprechen dabei der Forderung nach Parallelität der zwei
ursprünglichen Gradienten, die dritte Komponente
-Komponente
dieser Gleichung entsprechen dabei der Forderung nach Parallelität der zwei
ursprünglichen Gradienten, die dritte Komponente  ist identisch mit .
ist identisch mit .
Punkte, bei denen der Gradient der Lagrange-Funktion oder der Nebenbedingung
verschwindet, werden auch kritische
Punkte der Lagrange-Funktion genannt. Letztere werden hinzugezogen, weil das
Verfahren der Lagrange-Multiplikatoren über sie keine Aussage treffen kann und
sie daher als Kandidaten für Extremstellen in Betracht kommen. Da im Allgemeinen
nicht jeder kritische Punkt der Lagrange-Funktion das ursprüngliche
Optimierungsproblem löst, liefert dieses Verfahren nur eine notwendige Bedingung
für die Lösung des Optimierungsproblems.
Beispiele
Beispiel mit Nebenbedingung ohne verschwindenden Gradienten
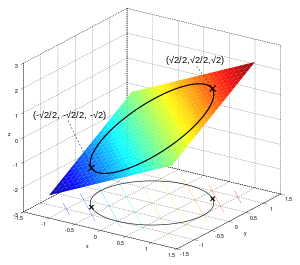
In diesem Beispiel soll die Funktion  unter der Nebenbedingung
unter der Nebenbedingung  optimiert werden. Die Nebenbedingung entspricht also dem Einheitskreis. Mit
Hilfe der Grafik kann das Maximum bei
optimiert werden. Die Nebenbedingung entspricht also dem Einheitskreis. Mit
Hilfe der Grafik kann das Maximum bei  sehr leicht bestimmt werden. Das Minimum des Optimierungsproblems liegt bei
sehr leicht bestimmt werden. Das Minimum des Optimierungsproblems liegt bei
 .
.
Zunächst überprüfen wir, an welchen Punkten des Einheitskreises der Gradient
der Nebenbedingungsfunktion  verschwindet. Wir berechnen also
verschwindet. Wir berechnen also

und sehen, dass dies nur im Ursprung gleich  ist. Jedoch liegt dieser Punkt nicht auf dem Einheitskreis, erfüllt also nicht
die Nebenbedingung und wird somit nicht in die Liste der kritischen Punkte
aufgenommen.
ist. Jedoch liegt dieser Punkt nicht auf dem Einheitskreis, erfüllt also nicht
die Nebenbedingung und wird somit nicht in die Liste der kritischen Punkte
aufgenommen.
Um die Methode der Lagrange-Multiplikatoren anwenden zu können, sei  und
und
 .
.
Die Bedingung  ergibt die folgenden drei Gleichungen:
ergibt die folgenden drei Gleichungen:

Die dritte Gleichung (iii) entspricht dabei wie immer der geforderten
Nebenbedingung. Mit  kann (i) nach
aufgelöst werden. Dasselbe macht man für Gleichung (ii) und .
Man erhält somit
kann (i) nach
aufgelöst werden. Dasselbe macht man für Gleichung (ii) und .
Man erhält somit  .
Wird das in (iii) eingesetzt, erhält man
.
Wird das in (iii) eingesetzt, erhält man  ,
also
,
also  .
Die kritischen Punkte berechnen sich damit zu
und .
Die zu optimierende Funktion
hat an diesen zwei Punkten die Werte
.
Die kritischen Punkte berechnen sich damit zu
und .
Die zu optimierende Funktion
hat an diesen zwei Punkten die Werte  ,
bzw.
,
bzw.  .
.
Beispiel mit Anwendungsbezug
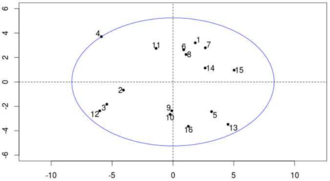
Ein Hirte möchte seine Herde von  Schafen mit einem Zaun eingrenzen. Das abgegrenzte Grundstück soll die Form
einer Ellipse mit Schwerpunkt im
Ursprung und Haupt- und Nebenachse parallel zur -
und -Achse
aufweisen. Außerdem soll das Grundstück mit der Fläche
Schafen mit einem Zaun eingrenzen. Das abgegrenzte Grundstück soll die Form
einer Ellipse mit Schwerpunkt im
Ursprung und Haupt- und Nebenachse parallel zur -
und -Achse
aufweisen. Außerdem soll das Grundstück mit der Fläche

so klein wie möglich sein. Die Nebenbedingung liegt in Form der Gleichung

vor, die eine Ellipse mit Zentrum im Ursprung, Hauptachse der Länge  und Nebenachse der Länge
und Nebenachse der Länge  beschreibt. Hauptachse und Nebenachse liegen parallel zur -
und -Achse,
weshalb die Ellipse durch die Punkte
beschreibt. Hauptachse und Nebenachse liegen parallel zur -
und -Achse,
weshalb die Ellipse durch die Punkte  und
und  verläuft.
verläuft.
Um den Flächeninhalt der Ellipse zu minimieren, sollte sie in diesem Beispiel
durch die Position
des Schafes mit dem größten Abstand zum Ursprung verlaufen. Das vierte Schaf ist
am weitesten vom Ursprung entfernt, deswegen verläuft die Ellipse durch diesen
Punkt.
Die allgemeine Lagrange-Funktion mit beliebigen Werten für
und
lautet

mit .
Der Gradient hiervon wird auf Null gesetzt, um die kritischen Punkte zu
bestimmen. Hierbei wird  und
und  vorausgesetzt. Denn für
vorausgesetzt. Denn für  oder
oder  erhielte man eine leere Ellipse.
erhielte man eine leere Ellipse.



Die erste Gleichung wird zu  umgeformt und in die zweite Gleichung eingesetzt.
umgeformt und in die zweite Gleichung eingesetzt.  ergibt
ergibt  .
Setzt man diesen Ausdruck in die dritte Gleichung ein, erhält man durch
Rückeinsetzen die Lösungen
.
Setzt man diesen Ausdruck in die dritte Gleichung ein, erhält man durch
Rückeinsetzen die Lösungen
 .
.
Der Gradient der Nebenbedingungsfunktion  verschwindet für
verschwindet für  .
Da der Punkt
nicht auf der Ellipse liegt, handelt es sich bei
.
Da der Punkt
nicht auf der Ellipse liegt, handelt es sich bei  um das gesuchte Minimum. Dies muss im Einzelfall grafisch überprüft werden, da
die Lagrange-Multiplikatoren nur ein notwendiges Kriterium liefern.
um das gesuchte Minimum. Dies muss im Einzelfall grafisch überprüft werden, da
die Lagrange-Multiplikatoren nur ein notwendiges Kriterium liefern.
Der eingeschlossene Weidegrund hat eine Fläche von  Flächeninhalten.
Flächeninhalten.
Beispiel mit Nebenbedingung mit verschwindendem Gradienten
Wir betrachten die Funktion  mit
mit  .
Untersucht man die Funktion nun auf Extrema, so kann man mithilfe des
hinreichenden Kriteriums für lokale Extremstellen alle Extrema im Inneren des
Definitionsbereiches bestimmen. Die Randextrema werden jedoch mithilfe des
Lagrange-Multiplikator gefunden. Dabei bildet der Rand des Definitionsbereiches
die Nebenbedingung. Hier sind es die beiden positiven Koordinatenachsen und der
Ursprung. Wir finden also die Nebenbedingung
.
Untersucht man die Funktion nun auf Extrema, so kann man mithilfe des
hinreichenden Kriteriums für lokale Extremstellen alle Extrema im Inneren des
Definitionsbereiches bestimmen. Die Randextrema werden jedoch mithilfe des
Lagrange-Multiplikator gefunden. Dabei bildet der Rand des Definitionsbereiches
die Nebenbedingung. Hier sind es die beiden positiven Koordinatenachsen und der
Ursprung. Wir finden also die Nebenbedingung  mit
mit  .
.
Wir stellen zunächst die Lagrange-Funktion auf:

Die Gleichung

führt uns auf das Gleichungssystem

Die dritte Gleichung besagt, dass  oder
oder  .
Angenommen es wäre ,
dann führt dies – in die zweite Gleichung eingesetzt – auf einen Widerspruch,
denn die Gleichung
.
Angenommen es wäre ,
dann führt dies – in die zweite Gleichung eingesetzt – auf einen Widerspruch,
denn die Gleichung

hat keine Lösung, da die  -Funktion
keine Nullstellen besitzt. Analog führt man den Fall
mit der ersten Gleichung auf einen Widerspruch. Der Lagrange-Multiplikator
liefert also keine kritischen Punkte.
-Funktion
keine Nullstellen besitzt. Analog führt man den Fall
mit der ersten Gleichung auf einen Widerspruch. Der Lagrange-Multiplikator
liefert also keine kritischen Punkte.
Jedoch haben wir nicht überprüft, an welchen Stellen der Gradient der Nebenbedingung verschwindet. Es gilt

Im Ursprung verschwindet also der Gradient der Nebenbedingung, und dieser
liegt auch auf dem Rand des Definitionsbereiches von
(er erfüllt die Nebenbedingung). Wie oben beschrieben, müssen diese Punkte auch
als Kandidaten für Extrema in Betracht gezogen werden. Und in der Tat ist  und
und  für alle
für alle  .
Der Ursprung ist also das globale Maximum der Funktion.
.
Der Ursprung ist also das globale Maximum der Funktion.
Das Vorhandensein von kritischen Punkten sagt jedoch nichts über das
Vorhandensein von Extrema aus. Würde man in diesem Beispiel die
Definitionsbereiche von
und
durch  ersetzen, so würde man zwar denselben einzigen kritischen Punkt erhalten, jedoch
wäre der Ursprung kein globales (und auch kein lokales) Maximum von
(z.B. divergiert die Funktion im 3. Quadranten). In der Tat besäße dieses
keine lokalen Maxima oder Minima.
ersetzen, so würde man zwar denselben einzigen kritischen Punkt erhalten, jedoch
wäre der Ursprung kein globales (und auch kein lokales) Maximum von
(z.B. divergiert die Funktion im 3. Quadranten). In der Tat besäße dieses
keine lokalen Maxima oder Minima.
Mehrere Nebenbedingungen
Es sei
eine in einer offenen Teilmenge  definierte Funktion. Wir definieren
definierte Funktion. Wir definieren  voneinander unabhängige Nebenbedingungen
voneinander unabhängige Nebenbedingungen  ,
,
 .
D.h. die Gradienten der Nebenbedingungen sind für jeden Punkt
.
D.h. die Gradienten der Nebenbedingungen sind für jeden Punkt  ,
mit
für alle ,
linear unabhängig. Insbesondere bedeutet dies, dass keiner der Gradienten
verschwindet. Sollten die Gradienten doch an einer Stelle linear abhängig sein,
so wird dieser Punkt in die Liste der kritischen Punkte aufgenommen. Nun setzen
wir
,
mit
für alle ,
linear unabhängig. Insbesondere bedeutet dies, dass keiner der Gradienten
verschwindet. Sollten die Gradienten doch an einer Stelle linear abhängig sein,
so wird dieser Punkt in die Liste der kritischen Punkte aufgenommen. Nun setzen
wir

wobei  und
und  ist.
ist.
Wir schauen uns nun den kritischen
Punkt von  an
an

was äquivalent ist zu

Wir ermitteln die unbekannten Multiplikatoren  mit Hilfe unserer Nebenbedingungsgleichungen und haben damit einen kritischen
Punkt (d. h.
mit Hilfe unserer Nebenbedingungsgleichungen und haben damit einen kritischen
Punkt (d. h.  )
von
gefunden. Dies ist eine notwendige Bedingung dafür, dass
ein Extremum auf der Menge der Punkte, welche die Nebenbedingungen erfüllen,
hat. D.h. auch hier müssen die Extrema aus der Liste der kritischen Punkte
mit anderen Mitteln herausgefiltert werden.
)
von
gefunden. Dies ist eine notwendige Bedingung dafür, dass
ein Extremum auf der Menge der Punkte, welche die Nebenbedingungen erfüllen,
hat. D.h. auch hier müssen die Extrema aus der Liste der kritischen Punkte
mit anderen Mitteln herausgefiltert werden.
Man beachte, dass es deshalb insbesondere falsch ist, davon zu sprechen, die "Lagrange-Funktion zu maximieren". Die Lagrange-Funktion ist unbeschränkt und besitzt deshalb keine globalen Extrema und kann somit nicht maximiert werden. Lediglich die kritischen Stellen der Lagrange-Funktion geben Punkte an, an denen die Zielfunktion bezüglich der Nebenbedingungen möglicherweise ein Maximum annimmt.
Hinreichende Bedingungen
Dieses Verfahren liefert nur eine notwendige Bedingung für Extremstellen. Um die Extremstellen nachzuweisen und ihre Art zu bestimmen gibt es verschiedene Kriterien. Generell wird die geränderte Hesse-Matrix gebildet und deren Determinante bzw. bestimmte Unterdeterminanten berechnet. Dieser Ansatz führt aber nicht immer zu einer Aussage. Alternativ kann man auch auf eine Visualisierung bzw. geometrische Überlegungen zurückgreifen, um die Art der Extremstelle festzustellen.
Bedeutung der Lagrange-Multiplikatoren in der Physik
Die Bedeutung der Lagrange-Multiplikatoren in der Physik wird bei der
Anwendung in der klassischen
Mechanik sichtbar. Hierfür wurden sie von Lagrange auch
(etwa 1777?) eingeführt. Die Bewegungsgleichungen der klassischen Mechanik
lassen sich im Lagrange-Formalismus
mit Hilfe der Euler-Lagrange-Gleichung
aus der Bedingung gewinnen, dass die Wirkung
– bei Variation der Koordinaten und ihrer Zeitableitungen unabhängig
voneinander – ein Extremum annimmt. Eine physikalische Zwangsbedingung, die
die Bewegung einschränkt, erscheint als Nebenbedingung des Extremums. Der
Lagrange-Multiplikator, mit dem die Zwangsbedingung in die Lagrange-Funktion
eingefügt wird, stellt sich als die physikalische Zwangskraft
heraus, mit der das durch die Bewegungsgleichung
beschriebene Objekt zur Einhaltung der Zwangsbedingung gebracht wird. Das
folgende Beispiel einer freien Punktmasse
 ,
die sich in zwei Dimensionen auf einer Bahn mit konstantem Radius
,
die sich in zwei Dimensionen auf einer Bahn mit konstantem Radius  bewegt, macht dieses klar:
bewegt, macht dieses klar:
Lagrange-Funktion (kinetische Energie in Polarkoordinaten):

Zwangsbedingung:

neue Lagrange-Funktion:

Euler-Lagrange-Gleichung (hier nur für die radiale Koordinate formuliert, da die Zwangsbedingung von dieser abhängt; die Winkelkoordinate ergibt die Drehimpulserhaltung für diese Bewegung):


mit  und
und  ,
sowie
,
sowie  (Winkelgeschwindigkeit).
(Winkelgeschwindigkeit).

Das entspricht der in Polarkoordinaten formulierten Zentripetalkraft, die die Punktmasse zur Bewegung auf eine Kreisbahn zwingt.
Verallgemeinerungen
Die Karush-Kuhn-Tucker-Bedingungen und die Fritz-John-Bedingungen sind eine Verallgemeinerung der Lagrange-Multiplikatoren für Nebenbedingungen, die auch durch Ungleichungen beschrieben werden. Beide spielen eine wichtige Rolle in der nichtlinearen Optimierung. Für konvexe Optimierungsprobleme, bei denen die Funktionen nicht stetig differenzierbar sind, gibt es außerdem die Sattelpunktkriterien der Lagrange-Funktion.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 02.05. 2021