Bewegungsgleichung
Unter einer Bewegungsgleichung versteht man eine mathematische Gleichung (oder auch ein Gleichungssystem), die die räumliche und zeitliche Entwicklung eines mechanischen Systems unter Einwirkung äußerer Einflüsse vollständig beschreibt. In der Regel handelt es sich um Systeme von Differentialgleichungen zweiter Ordnung.
Diese Differentialgleichungen sind für viele Systeme nicht analytisch lösbar, sodass man bei der Lösung geeignete Näherungsverfahren anwenden muss.
Prinzipien
Zum Aufstellen von Bewegungsgleichungen in der klassischen Physik wird
- das 2. Newtonsche Gesetz,
- der Lagrange-Formalismus oder
- der Hamilton-Formalismus
verwendet. Darauf basierend ergibt sich die Bewegungsgleichung der Quantenmechanik, die Schrödingergleichung.
In der Technischen Mechanik werden
- das Prinzip der virtuellen Arbeit (D’Alembertsches Prinzip)
- das Prinzip der virtuellen Leistung (Prinzip von Jourdain)
- das Prinzip des kleinsten Zwanges
verwendet.
Lösung
Die Lösung der Bewegungsgleichung ist die Trajektorie, auf der sich das System bewegt. Sie ist, abgesehen von einigen einfachen Fällen (siehe Beispiele unten), meist nicht in analytisch geschlossener Form darstellbar und muss über numerische Methoden gewonnen werden. Dies ist z.B. zur Ermittlung der Trajektorien dreier Himmelskörper, die sich gegenseitig gravitativ anziehen, erforderlich (siehe Dreikörperproblem). Zur Lösung eines N-Teilchensystems lässt sich die discrete element method anwenden. In einfachen Fällen wird die geschlossene Lösung als „Bahngleichung“ bezeichnet.
Beispiele
Eine allgemeine Form der Bewegungsgleichung in der klassischen Physik lautet beispielsweise
 .
.
Oder bekannter:

Auf der linken Seite steht der Trägheitsterm
für das Teilchen der Masse  ,
auf der rechten Seite werden alle auf das Teilchen wirkenden Kräfte
,
auf der rechten Seite werden alle auf das Teilchen wirkenden Kräfte  aufsummiert.
aufsummiert.
Bewegungsgleichung eines kräftefreien Masseteilchens
Die Bewegungsgleichung lautet in diesem Fall

mit:
 :
:
 :
(zeitabhängiger)
:
(zeitabhängiger) Die Bahn erhält man durch zweimaliges Integrieren der Differentialgleichung:

mit den Integrationskonstanten:
 :
Geschwindigkeit des Teilchens zu
:
Geschwindigkeit des Teilchens zu  ,
, :
Ort des Teilchens zu
:
Ort des Teilchens zu
Das Teilchen bewegt sich also geradlinig mit konstanter Geschwindigkeit. Die
Masse
spielt keine Rolle.
Bewegungsgleichung eines Teilchens unter Einfluss einer konstanten Kraft
Ein Körper der Masse
sei der Schwerkraft  ausgesetzt:
ausgesetzt:
 .
.
Die Bahngleichung lautet

und stellt den ballistischen Parabelwurf dar. Für  erhält man den freien
Fall. Im Fall der Schwerkraft spielt die Masse
des Körpers also keine Rolle.
erhält man den freien
Fall. Im Fall der Schwerkraft spielt die Masse
des Körpers also keine Rolle.
Bewegungsgleichung der Speziellen Relativitätstheorie
In der speziellen
Relativitätstheorie wird die Viererkraft
definiert als die Ableitung des relativistischen Impulses p nach der Eigenzeit
 ,
mit
,
mit
 ,
,
wobei zwischen Eigenzeit und der Zeit t der Zusammenhang

gilt und  den Lorentzfaktor bezeichnet.
den Lorentzfaktor bezeichnet.
Aus dieser Bewegungsgleichung folgt, dass zwischen den klassischen Größen der
räumlichen Kraft  und Beschleunigung
und Beschleunigung  zwar ein linearer
Zusammenhang besteht, aber keine einfache Proportionalität mehr: Für Anteile von
parallel zur Bewegungsrichtung gilt
zwar ein linearer
Zusammenhang besteht, aber keine einfache Proportionalität mehr: Für Anteile von
parallel zur Bewegungsrichtung gilt  ,
für senkrechte Anteile hingegen
,
für senkrechte Anteile hingegen  .
.
Bewegungsgleichung der Allgemeinen Relativitätstheorie
Die Bewegung eines Körpers wird durch die Geodätengleichung der gekrümmten Raumzeit beschrieben, sofern nur gravitative Kräfte auf ihn einwirken. Dann bewegt sich der Körper entlang einer Geodäten der Raumzeit. Die Geodätengleichung lautet

wobei  ein Christoffelsymbol
2. Art ist, welches die Abhängigkeit des metrischen
Tensors vom Raumzeitpunkt (Ereignis), d.h. der Krümmung der Raumzeit,
charakterisiert.
ein Christoffelsymbol
2. Art ist, welches die Abhängigkeit des metrischen
Tensors vom Raumzeitpunkt (Ereignis), d.h. der Krümmung der Raumzeit,
charakterisiert.
Bewegungsgleichung in der Strukturdynamik
In der Strukturdynamik ist die Bewegungsgleichung eines dynamisch belasteten Tragwerks die Grundlage der Berechnung:

Hierbei ist  der Lastvektor des Systems.
der Lastvektor des Systems.  und
und  sind die Masse-, Dämpfungs- und Steifigkeitsmatrizen des Tragwerks. Der Vektor
sind die Masse-, Dämpfungs- und Steifigkeitsmatrizen des Tragwerks. Der Vektor
 enthält die Verschiebungsgrößen. Die matrizielle Aufbereitung entsprechend den
Freiheitsgraden einer Struktur eignet sich sehr gut für eine Computerberechnung,
zum Beispiel nach der Finite-Elemente-Methode.
enthält die Verschiebungsgrößen. Die matrizielle Aufbereitung entsprechend den
Freiheitsgraden einer Struktur eignet sich sehr gut für eine Computerberechnung,
zum Beispiel nach der Finite-Elemente-Methode.
Quantenmechanisches Kastenpotential
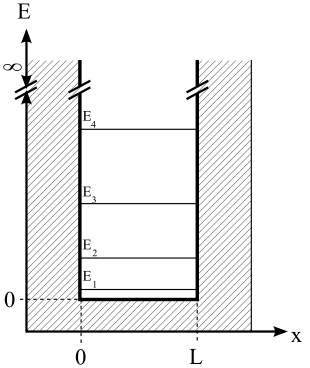
In der Quantenmechanik
tritt die Schrödingergleichung
als Bewegungsgleichung auf. Für das einfache Problem des Teilchens im
eindimensionalen Kastenpotential der Länge  mit unendlich hohen Wänden lautet die zeitunabhängige Schrödingergleichung:
mit unendlich hohen Wänden lautet die zeitunabhängige Schrödingergleichung:

mit
 :
Wellenfunktion des
Teilchens
:
Wellenfunktion des
Teilchens :
Kastenpotential
:
Kastenpotential  .
.
Die Energieeigenwerte
 sowie die zugehörigen Eigenfunktionen
sowie die zugehörigen Eigenfunktionen
 ,
,
 ,
lauten:
,
lauten:

.



© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 27.01. 2024