d’Alembertsches Prinzip
Das d’Alembertsche Prinzip (nach Jean-Baptiste le Rond d’Alembert) der klassischen Mechanik erlaubt die Aufstellung der Bewegungsgleichungen eines mechanischen Systems mit Zwangsbedingungen. Das Prinzip beruht auf dem Satz, dass die Zwangskräfte bzw. -momente in einem mechanischen System keine virtuelle Arbeit leisten.
Der Name „d’Alembertsches Prinzip“ wird von manchen Autoren für das Dynamische Gleichgewicht zwischen äußerer Kraft und d’Alembertscher Trägheitskraft verwendet, während andere Autoren dies mit heftigen Worten als eine unzulässige Verkürzung ablehnen.
Vorüberlegungen
Die Bewegungsgleichung für einen Massepunkt wird in einem Inertialsystem formuliert. Sie lautet nach dem zweiten newtonschen Gesetz:

Darin sind  die Masse,
die Masse,  die Absolutbeschleunigung und
die Absolutbeschleunigung und  die äußere Kraft. Diese Grundgleichung der Mechanik kann auf die
Form:
die äußere Kraft. Diese Grundgleichung der Mechanik kann auf die
Form:

gebracht werden. Der Term  wird als Kraft aufgefasst und als d'Alembertsche Trägheitskraft
wird als Kraft aufgefasst und als d'Alembertsche Trägheitskraft  bezeichnet.
bezeichnet.

Das dynamische Problem ist auf ein Gleichgewichtsproblem der Statik zurückgeführt. Man bezeichnet die Beziehung deshalb auch als dynamisches Gleichgewicht. Ein Problem der Dynamik kann somit auch mit Methoden der Statik behandelt werden, wenn Trägheitskräfte berücksichtigt werden. Beim d'Alembertschen Prinzip wird im Folgenden das Prinzip der virtuellen Arbeit ausgenutzt, das in der Statik zur Berechnung unbekannter Lagerkräfte eingesetzt werden kann.
Einführung
Bei einem System von N Massepunkten lautet die Bewegungsgleichung für die Masse i
 .
.
Dabei ist  die resultierende äußere Kraft auf den Massepunkt i. Sie ist die Summe
aus eingeprägter Kraft
die resultierende äußere Kraft auf den Massepunkt i. Sie ist die Summe
aus eingeprägter Kraft  und Zwangskraft
und Zwangskraft  .
.

Eingesetzt in die Newtonsche Bewegungsgleichung:

Die Zwangskraft berechnet sich somit zu

Man bildet das Skalarprodukt
der Zwangskräfte mit den
virtuellen Verschiebungennote[Anmerkung 1]
 .
Wenn nach dem Prinzip
der virtuellen Arbeit die Zwangskräfte insgesamt keine virtuelle Arbeit
verrichten, verschwindet die Summe der Skalarprodukte von Zwangskräften und
virtuellen Verschiebungen:
.
Wenn nach dem Prinzip
der virtuellen Arbeit die Zwangskräfte insgesamt keine virtuelle Arbeit
verrichten, verschwindet die Summe der Skalarprodukte von Zwangskräften und
virtuellen Verschiebungen:

Man erhält das d’Alembertsche Prinzip (in der Formulierung von Joseph-Louis Lagrange):

In der Gleichung treten die Zwangskräfte nicht mehr auf – nur die eingeprägten Kräfte. Die Zwangsbedingungen verstecken sich noch in den virtuellen Verschiebungen, denn es sind nur solche erlaubt, die mit den Zwangsbedingungen vereinbar sind.
Um daraus Bewegungsgleichungen zu gewinnen, geht man bei  (holonomen)
Zwangsbedingungen zu
(holonomen)
Zwangsbedingungen zu  unabhängigen Koordinaten (Freiheitsgraden)
unabhängigen Koordinaten (Freiheitsgraden)  über und drückt Lage, Geschwindigkeit, Beschleunigung, und virtuelle
Verschiebungen der N Massen durch diese neuen Lagekoordinaten („generalisierte
Koordinaten“) aus.
über und drückt Lage, Geschwindigkeit, Beschleunigung, und virtuelle
Verschiebungen der N Massen durch diese neuen Lagekoordinaten („generalisierte
Koordinaten“) aus.

Da sich die neuen Koordinaten unabhängig variieren lassen, ergeben sich  Differentialgleichungen zweiter Ordnung, die sich nach
Differentialgleichungen zweiter Ordnung, die sich nach  auflösen lassen. Die konkrete Vorgehensweise zur Aufstellung der
Bewegungsgleichungen ist dem nächsten Abschnitt zu entnehmen.
auflösen lassen. Die konkrete Vorgehensweise zur Aufstellung der
Bewegungsgleichungen ist dem nächsten Abschnitt zu entnehmen.
Für holonome Zwangsbedingungen und konservative Kräfte (die sich aus einer Potentialfunktion ableiten lassen) ist das d’Alembert-Prinzip dann äquivalent zu den Lagrangegleichungen erster Art.
Gelegentlich wird schon die eingangs wiedergegebene einfache Umstellung der newtonschen Bewegungsgleichung als das d’Alembertsche Prinzip bezeichnet. Das übersieht aber wesentliche Folgerungen wie die Elimination von Zwangskräften, die keine virtuelle Arbeit leisten und kommt in den Worten von Georg Hamel fast einer Beleidigung von d’Alembert gleich. Es ist zudem zu beachten, dass das verwendete Prinzip der virtuellen Arbeit nicht aus den Newtonschen Axiomen folgt, sondern ein eigenes Grundpostulat darstellt.
Erweiterung auf Mehrkörpersysteme
Im allgemeinen Fall von Mehrkörpersystemen wird berücksichtigt, dass auch die virtuelle Arbeit der Zwangsmomente auf den virtuellen Verdrehungen verschwindet. Zur Berechnung der Zwangsmomente wird die Eulersche Gleichung verwendet.
![{\sum _{{i=1}}^{N}\left(\left[m_{i}{\ddot {{\vec r}}}_{i}-{\vec {F}}_{i}^{e}\right]\delta {\vec {r}}_{i}^{{\,T}}+\left[I_{i}\,{\dot {{\vec \omega }}}_{i}+{\vec {\omega }}_{i}\times I_{i}\,{\vec {\omega }}_{i}-{\vec M}_{i}^{e}\right]\delta {\vec {\varphi }}_{i}^{{\,T}}\right)=0}.](/svg/d29b49868a143c3a7f6d4cfe628fd4282788d5ab.svg)
- mit
-
 Trägheitstensor
des Körpers i
Trägheitstensor
des Körpers i Winkelbeschleunigung
des Körpers i
Winkelbeschleunigung
des Körpers i Winkelgeschwindigkeit
des Körpers i
Winkelgeschwindigkeit
des Körpers i eingeprägtes Moment auf den Körper i
eingeprägtes Moment auf den Körper i virtuelle Verdrehung des Körpers i.
virtuelle Verdrehung des Körpers i.
Bei N Körpern und k Bindungen ergeben sich  Freiheitsgrade.
Freiheitsgrade.
Die virtuellen Verschiebungen bzw. Verdrehungen erhält man aus den partiellen Ableitungen der translatorischen bzw. rotatorischen Lagekoordinaten nach den verallgemeinerten Koordinaten:


Die Beschleunigungen lassen sich in einen Teil, der nur von den zweiten Ableitungen der verallgemeinerten Koordinaten abhängt, und einen Restterm zerlegen:
 und
und .
.
Damit lässt sich das Differentialgleichungssystem zweiter Ordnung in Matrixform darstellen.

Dabei sind:
 die f x f Massenmatrix
die f x f Massenmatrix der Vektor der verallgemeinerten Kräfte
der Vektor der verallgemeinerten Kräfte der Vektor der verallgemeinerten Momente
der Vektor der verallgemeinerten Momente
Die Elemente der Massenmatrix berechnen sich zu:

Für die Komponenten verallgemeinerten Kräfte bzw. Momente ergibt sich:
![F_{m}^{*}=\sum _{{i=1}}^{N}\left({\frac {\partial {\vec {r}}_{i}^{{\,T}}}{\partial q_{m}}}\left[{\vec {F}}_{i}{^{e}}-m_{i}\,{\vec {a}}_{i}^{{\,*}}\right]\right)](/svg/434a1551a72e9f9372fac124aaf854cdc8b062ca.svg)
![M_{m}^{*}=\sum _{{i=1}}^{N}\left({\frac {\partial {\vec {\varphi }}_{i}^{{\,T}}}{\partial q_{m}}}\left[{\vec {M}}_{i}{^{e}}-I_{i}\,{\vec {\alpha }}_{i}^{{\,*}}-{\vec {\omega }}_{i}\times I_{i}\,{\vec {\omega }}_{i}\right]\right)](/svg/8295eb2e6e3e17481ae1f2f2579048df25683bab.svg)
Die Berechnung der Massenmatrix sowie der verallgemeinerten Kräfte und Momente kann numerisch im Rechner durchgeführt werden. Das Differentialgleichungssystem kann ebenfalls numerisch mit gängigen Programmen gelöst werden. Die Behandlung großer Mehrkörpersysteme mit kinematischen Bindungen wird so erst möglich.
Beispiel Fadenpendel
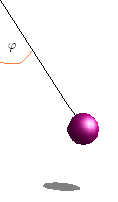
 ist die Auslenkung aus der Gleichgewichtslage
und generalisierte Koordinate
ist die Auslenkung aus der Gleichgewichtslage
und generalisierte KoordinateBeim ebenen Fadenpendel
mit der Masse
wird der Winkel ,
mit dem der Faden aus der Ruheposition ausgelenkt ist, als Freiheitsgrad
gewählt. Die konstante Fadenlänge  stellt eine holonome Zwangsbedingung dar. Position, Geschwindigkeit und
Beschleunigung der Masse können daher in Abhängigkeit dieses Winkels ausgedrückt
werden:
stellt eine holonome Zwangsbedingung dar. Position, Geschwindigkeit und
Beschleunigung der Masse können daher in Abhängigkeit dieses Winkels ausgedrückt
werden:



Die virtuelle Verschiebung ergibt sich zu:

Als eingeprägte Kraft wirkt die Gewichtskraft:

Die Bewegungsgleichung ergibt sich aus der Bedingung, dass die virtuelle Arbeit der Zwangskräfte verschwindet.

Durch Auswertung der Skalarprodukte erhält man schließlich:

Masse und Fadenlänge lassen sich kürzen, so dass man die bekannte Differentialgleichung:

erhält.
Die Vorgehensweise erscheint bei diesem einfachen Beispiel sehr umständlich. Da aber nur Skalarprodukte ausgewertet werden müssen, kann dies bei großen Systemen automatisiert werden und numerisch im Rechner durchgeführt werden. Dies erleichtert die Aufstellung von Bewegungsgleichungen wesentlich.
Anmerkungen
- ↑ Infinitesimale Verschiebungen heißen virtuell, wenn sie mit den Zwangsbedingungen verträglich sind. Außerdem sollen sie unmittelbar (oder instantan, zu einer festen Zeit) erfolgen.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.05. 2021