Diskrete Sinustransformation
Die diskrete Sinustransformation (DST, englisch discrete sine transform) ist eine reellwertige, diskrete, lineare, orthogonale Transformation, die ähnlich wie der imaginäre Teil der diskreten Fouriertransformation (DFT) ein zeitdiskretes Signal vom Zeitbereich (bei Zeitsignalen) bzw. dem Ortsbereich (bei räumlichen Signalen) in den Frequenzbereich transformiert.
Sie ist eng verwandt mit der diskreten Kosinustransformation (DCT), basiert aber im Gegensatz auf der ungeraden Sinusfunktion.
Anwendung der DST, wie auch der DCT, liegen bei der Lösung von partiellen Differentialgleichungen. Bei dem Videostandard H.265 kann die DST bei bestimmten Einstellungen zum Einsatz kommen. Im Gegensatz zur DCT besitzt die DST in den meisten Fällen keine wesentliche Anwendung im Bereich der Signalverarbeitung und Datenkompression.
Definition
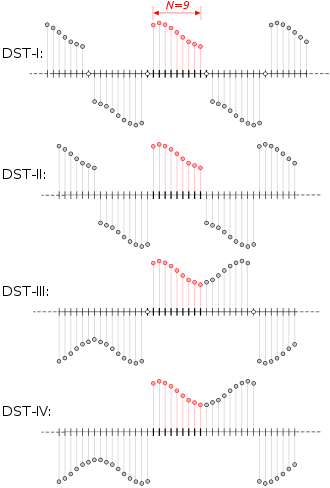
Es gibt in Summe acht verschiedene Formen der DST, die in der Literatur mit DST-I bis DST-VIII bezeichnet werden. Sie unterscheiden sich durch die Art, wie die endliche Folge am Anfang der Folge ungerade fortgesetzt wird. Die DST-I bis DST-IV ist, bis auf einen konstanten Faktor, gleichwertig zur reellwertigen, ungeraden DFT mit gerader Ordnung. Die verschiedenen Arten der DST bilden dabei jeweils die reellwertige Eingabefolge, aus dem Orts- bzw. Zeitbereich, mit N Elementen x[n] auf eine reellwertige Ausgabefolge, den Spektralbereich, X[n] ab:
![x[n]=x_{0},\ldots ,x_{{N-1}}\Rightarrow X[n]=X_{0},\ldots ,X_{{N-1}}](/svg/839d4790d1902161fb31257d221e3ac11d9439b4.svg)
Die vier gebräuchlichsten DST-Arten sind DST-I bis DST-IV:
DST-I
Die DST-I ist bezüglich ihrer Randwerte ungerade am Anfang um x−1 und ungerade am Ende um xN.
![X_k = \sum_{n=0}^{N-1} x_n \sin \left[\frac{\pi}{N+1} (n+1) (k+1) \right] \quad \quad k = 0, \dots, N-1](/svg/ebbaf9d8750d87d0c1565cc7d4953c99d6eaf57e.svg)
DST-II
Die DST-II ist bezüglich ihrer Randwerte ungerade am Anfang um x−1/2 und ungerade am Ende um xN−1/2.
![X_k = \sum_{n=0}^{N-1} x_n \sin \left[\frac{\pi}{N} \left(n+\frac{1}{2}\right) (k+1)\right] \quad \quad k = 0, \dots, N-1](/svg/7ec4a97c9d25b6266d25cd0d66623125a8732469.svg)
DST-III
Die DST-III ist bezüglich ihrer Randwerte ungerade am Anfang um x−1 und gerade am Ende um xN−1.
![X_k = \frac{(-1)^k}{2} x_{N-1} + \sum_{n=0}^{N-2} x_n \sin \left[\frac{\pi}{N} (n+1) \left(k+\frac{1}{2}\right) \right] \quad \quad k = 0, \dots, N-1](/svg/aaf69b9150d88dbb7ad408958aefaa7b3338ca50.svg)
DST-IV
Die DST-IV ist bezüglich ihrer Randwerte ungerade am Anfang um x−1/2 und gerade am Ende um xN−1/2.
![X_k = \sum_{n=0}^{N-1} x_n \sin \left[\frac{\pi}{N} \left(n+\frac{1}{2}\right) \left(k+\frac{1}{2}\right) \right] \quad \quad k = 0, \dots, N-1](/svg/d240979de077d6ef8b3b352dd1b2da2158fd1c88.svg)
Inverse Transformation
Wie jede Transformation besitzt auch die DST eine inverse Transformation. Die Inverse der DST-I ist die DST-I mit einem konstanten Faktor 2/(N+1). Die Inverse der DST-IV ist die DST-IV mit dem konstanten Faktor 2/N. Die Inverse der DST-II ist die DST-III mit einem Faktor 2/N und umgekehrt.
Ähnlich wie bei der DCT sind die Vorfaktoren der DST in der Literatur nicht
einheitlich festgelegt. Beispielsweise wird von manchen Autoren ein zusätzlicher
Faktor von  eingeführt, um den zusätzlichen Faktor bei der inversen Operation zu vermeiden.
Durch geeignete Wahl des konstanten Faktors kann die Transformationsmatrix eine
orthogonale
Matrix darstellen.
eingeführt, um den zusätzlichen Faktor bei der inversen Operation zu vermeiden.
Durch geeignete Wahl des konstanten Faktors kann die Transformationsmatrix eine
orthogonale
Matrix darstellen.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 23.02. 2021