Bereissche Polkette
Bei einer ebenen Starrkörperbewegung besteht die Bereis’sche Polkette aus Raumpunkten, in denen eine Ableitung der Bewegung eines dort befindlichen Partikels nach der Zeit verschwindet. Bei einer ebenen Starrkörperbewegung, bei der sich der Starrkörper auch dreht, existiert immer ein Punkt, in dem die Geschwindigkeit des in ihm befindlichen Partikels null ist. Dieser Punkt ist der Momentanpol. Der Punkt, in dem die Beschleunigung verschwindet, ist der Beschleunigungspol. R. Bereis erkannte „brauchbare Hilfsmittel“ zur Untersuchung der Starrkörperbewegungen auch in denjenigen Raumpunkten, in denen die höheren Ableitungen nach der Zeit verschwinden. Demnach ist der Momentanpol der Pol erster Ordnung, denn die Geschwindigkeit ist die erste Ableitung der Bewegung nach der Zeit. Der Pol zweiter Ordnung ist der Beschleunigungspol, in dem die Beschleunigung verschwindet. Allgemein ist die n-te Ableitung der Bewegung nach der Zeit im n-ten Pol gleich null. Die Gesamtheit dieser Pole bildet die Bereis’sche Polkette.
Definition in der komplexen Zahlenebene
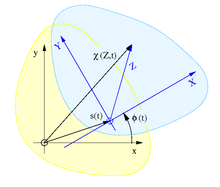
Der Momentanpol ist nur bei ebenen Bewegungen definiert und daher werde die Starrkörperbewegung als Bewegung der komplexen Zahlenebene modelliert. Der feststehende Bildraum ist die Rastebene, die den Raum unserer Anschauung repräsentiert und die das Rastkoordinatensystem und die Rastpolbahn enthält. Der bewegte Urbildraum ist die Gangebene, die den in ihr ruhenden Starrkörper und das Gangkoordinatensystem beinhaltet. Alle Partikel des Starrkörpers bewegen sich synchron mit der Gangebene mit. In Anlehnung an die räumliche eulersche- und die materielle lagrangesche Betrachtungsweise werden die Koordinaten in der Rastebene als räumlich sowie mit Kleinbuchstaben und die Koordinaten in der Gangebene als materiell sowie mit Großbuchstaben bezeichnet, siehe Bild.
Jeder Punkt in der komplexen Zahlenebene entspricht einer komplexen Zahl. Die
Translation eines Punktes wird mit der Addition einer anderen Zahl und die
Rotation um den Ursprung mit dem Produkt mit der komplexen Zahl  modelliert, worin
modelliert, worin  der Drehwinkel, e die eulersche
Zahl und i die imaginäre
Einheit ist.
der Drehwinkel, e die eulersche
Zahl und i die imaginäre
Einheit ist.
Die Bewegungsfunktion χ(Z,t) und Geschwindigkeit  eines Partikels Z kann dann in der Rastebene als
eines Partikels Z kann dann in der Rastebene als

geschrieben werden, wobei zuletzt auf die Angabe des Zeitparameters t der
Übersichtlichkeit halber verzichtet wurde. Der Punkt s bezeichnet einen sich
bewegenden Bezugspunkt, in dem der Ursprung des Gangkoordinatensystems liegt,
und die Drehgeschwindigkeit ω ergibt sich aus der Zeitableitung des Drehwinkels:
 .
Diese sei konstant:
.
Diese sei konstant:  .
.
Der erste Pol, der Momentanpol, ist derjenige Punkt p1, in dem die Geschwindigkeit null ist:

Der zweite Pol, der Beschleunigungspol, ist derjenige Punkt p2, in dem die Beschleunigung verschwindet:

Auf die gleiche Weise ermitteln sich die höheren Ableitungen:

Die Folge
(p1, p2, p3, … ) ist die Bereis’sche Polkette.
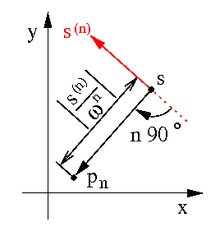
Die Identität  führt mit
führt mit

auf die Konstruktion im Bild.
Polkette und Zeitableitung
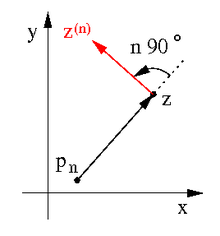
Durch Addition einer null kann die n-te Zeitableitung der Bewegung vorteilhaft mit dem n-ten Pol geschrieben werden:

Bei konstanter Winkelgeschwindigkeit schließt die n-te Zeitableitung der Bewegung mit dem ωn-fachen Richtungsvektor zum n-ten Pol gegen den Uhrzeigersinn den n-fachen rechten Winkel ein, siehe Bild.
Beispiel
Die Bereis’sche Polkette des im Bild animierten Systems soll berechnet
werden. Der Mittelpunkt s des Kreuzschiebers bewege sich mit der konstanten
Winkelgeschwindigkeit Ω auf der Kreisbahn mit dem Radius R um den Ursprung:
 .
Der Kreuzschieber dreht sich mit entgegengesetzt gleich großer
Winkelgeschwindigkeit ω=-Ω um seinen Mittelpunkt. Entsprechend lautet die
Bewegungsfunktion und die Geschwindigkeit:
.
Der Kreuzschieber dreht sich mit entgegengesetzt gleich großer
Winkelgeschwindigkeit ω=-Ω um seinen Mittelpunkt. Entsprechend lautet die
Bewegungsfunktion und die Geschwindigkeit:

Somit berechnet sich die Polkette:
![{\begin{array}{rclcl}z^{{(1)}}&=&2{\mathrm {i}}\Omega Re^{{{\mathrm {i}}\Omega t}}-{\mathrm {i}}\Omega z=0&\rightarrow &p_{1}=2Re^{{{\mathrm {i}}\Omega t}}\\z^{{(2)}}&=&2({\mathrm {i}}\Omega )^{2}Re^{{{\mathrm {i}}\Omega t}}-{\mathrm {i}}\Omega z^{{(1)}}=2({\mathrm {i}}\Omega )^{2}Re^{{{\mathrm {i}}\Omega t}}-{\mathrm {i}}\Omega [2{\mathrm {i}}\Omega Re^{{{\mathrm {i}}\Omega t}}-{\mathrm {i}}\Omega z]\\&=&({\mathrm {i}}\Omega )^{2}z=0&\rightarrow &p_{2}=0\\z^{{(3)}}&=&({\mathrm {i}}\Omega )^{2}z^{{(1)}}=0&\rightarrow &p_{3}=p_{1}\,.\end{array}}](/svg/0c63bbffae8203888854b5230056e77be2de23b6.svg)
Der vierte Pol wäre dann wieder im Ursprung. Die Pole springen zwischen dem Ursprung und dem Momentanpol hin und her:

Die n-te Zeitableitung der Bewegung an einem Ort z kann mit diesen Polen schnell angegeben werden:

Für den Mittelpunkt des Kreuzschiebers berechnet sich

was zu erwarten war.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 10.08. 2019