Ränderung
Als Ränderung (engl.: Bordering Method) bezeichnet man ein Verfahren zur Verbesserung der Lösungseigenschaften linearer Gleichungssysteme. Das Verfahren kommt in der linearen Algebra und der Numerik zur Anwendung.
Einem linearen Gleichungssystem

mit singulärer
oder schlecht konditionierter
Systemmatrix  kann man durch Hinzufügen von Zeilen und Spalten zu
kann man durch Hinzufügen von Zeilen und Spalten zu  und entsprechendes Vergrößern von
und entsprechendes Vergrößern von  und
und  ein erweitertes lineares Gleichungssystem zuordnen, bei dem die Systemmatrix gut
konditioniert (also auch regulär) ist. Die einfachen Beispiele in den nächsten
zwei Abschnitten sollen das verdeutlichen. Die durch Zeilen und Spalten ergänzte
Systemmatrix bezeichnet man auch als geränderte Matrix.
ein erweitertes lineares Gleichungssystem zuordnen, bei dem die Systemmatrix gut
konditioniert (also auch regulär) ist. Die einfachen Beispiele in den nächsten
zwei Abschnitten sollen das verdeutlichen. Die durch Zeilen und Spalten ergänzte
Systemmatrix bezeichnet man auch als geränderte Matrix.
Beispiel (Regularisierung)
Gegeben sei das Gleichungssystem

mit der  -Systemmatrix
-Systemmatrix
 ,
dem Einervektor
,
dem Einervektor  der Unbekannten und der rechten Seite
der Unbekannten und der rechten Seite  .
Dieses kann durch Ränderung der Systemmatrix mit der Spalte
.
Dieses kann durch Ränderung der Systemmatrix mit der Spalte  und der Zeile
und der Zeile  regularisiert werden:
regularisiert werden:

Die zu dem ursprünglichen System hinzugekommenen Einträge sind überstrichen.
Das geränderte System hat die eindeutige Lösung  mit
mit  .
Davon ist die durch die Ränderung dem ursprünglichen Problem zugeordnete Lösung
.
Davon ist die durch die Ränderung dem ursprünglichen Problem zugeordnete Lösung
 .
Die Größe von
.
Die Größe von  drückt aus, wie stark der regularisierende Einfluss der Ränderung ist.
drückt aus, wie stark der regularisierende Einfluss der Ränderung ist.
Beispiel (Verbesserung der Kondition)
In diesem Beispiel sei  ein bzgl. der euklidischen Norm mit 10 % Fehler behafteter Messwertvektor
aus dem mit Hilfe der Gleichung
ein bzgl. der euklidischen Norm mit 10 % Fehler behafteter Messwertvektor
aus dem mit Hilfe der Gleichung

die Größen  ermittelt werden sollen. Für
ermittelt werden sollen. Für  ergibt sich die Lösung
ergibt sich die Lösung  Für die um ca 10 % abweichende (also innerhalb der Fehlertoleranz
liegende) rechte Seite
Für die um ca 10 % abweichende (also innerhalb der Fehlertoleranz
liegende) rechte Seite  ermittelt man die vollkommen andere Lösung
ermittelt man die vollkommen andere Lösung  .
.
Ein Maß dafür, wie stark sich relative Fehler  in der Messung auf den relativen Fehler
in der Messung auf den relativen Fehler  des Rechenergebnisses auswirken, ist die Kondition
der Systemmatrix
des Rechenergebnisses auswirken, ist die Kondition
der Systemmatrix

Für die spezielle Wahl von
aus diesem Beispiel ergibt sich  .
Relative Fehler in den Messdaten
können sich also durch die schlechte Kondition der Matrix
ca. hundertfach im relativen Fehler der aus diesen Daten berechneten
Größen
niederschlagen.
.
Relative Fehler in den Messdaten
können sich also durch die schlechte Kondition der Matrix
ca. hundertfach im relativen Fehler der aus diesen Daten berechneten
Größen
niederschlagen.
Dieser Effekt ist im folgenden Bild für die oben vorgegebenen rechten Seiten
grafisch veranschaulicht. Aus dem oberen Teil des Bildes erkennt man, dass die
zwei Spaltenvektoren  und
und  von
beinahe linear abhängig voneinander sind.
von
beinahe linear abhängig voneinander sind.
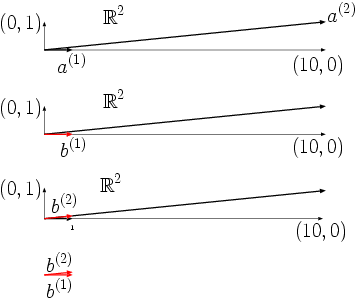
Dadurch fallen die im unteren Teil des Bildes rot dargestellten zwei rechten
Seiten  und
und  ,
die sehr nahe beieinander liegen, in die Bildräume unterschiedlicher Spalten von
und die Koeffizienten
in
,
die sehr nahe beieinander liegen, in die Bildräume unterschiedlicher Spalten von
und die Koeffizienten
in

unterscheiden sich beim Wechsel von  zu
zu  stark voneinander.
stark voneinander.
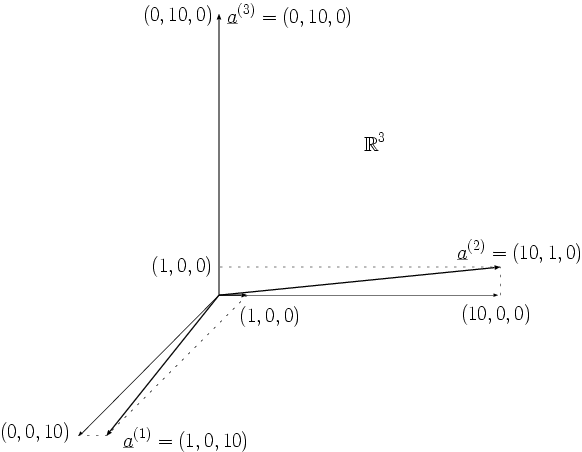
Effekt einer Ränderung: Das Hinzufügen einer zusätzlichen Zeile zu
entspricht der Erweiterung des Wertebereiches von
um eine Dimension vom  zum
zum  und mit dem Ergänzen einer Spalte kommt ein neuer Spaltenvektor
und mit dem Ergänzen einer Spalte kommt ein neuer Spaltenvektor  hinzu. Durch geschickte Wahl der zusätzlichen Komponenten
hinzu. Durch geschickte Wahl der zusätzlichen Komponenten  und des zusätzlichen Spaltenvektors
erreicht man, dass die Spaltenvektoren der geränderten Matrix
und des zusätzlichen Spaltenvektors
erreicht man, dass die Spaltenvektoren der geränderten Matrix  wesentlich besser voneinander separiert werden. Genauer wählt man die neuen
Freiheitsgrade möglichst so, dass die Spalten
wesentlich besser voneinander separiert werden. Genauer wählt man die neuen
Freiheitsgrade möglichst so, dass die Spalten  der geränderten Matrix
der geränderten Matrix  senkrecht aufeinander stehen und die gleiche Länge haben.
senkrecht aufeinander stehen und die gleiche Länge haben.
Im Beispiel erreicht man das näherungsweise mit der Ränderung

Die Lage der Spaltenvektoren der geränderten Matrix  im
ist im folgenden Bild veranschaulicht.
im
ist im folgenden Bild veranschaulicht.
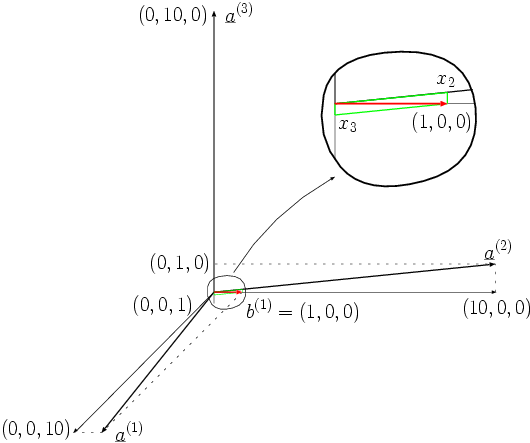
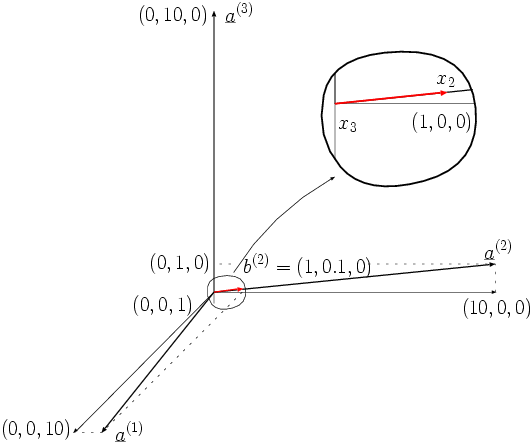
Für das geränderte System

ergeben sich mit den geränderten rechten Seiten  und
und  jeweils die Lösungen
jeweils die Lösungen  bzw.
bzw.  .
Die für die Messaufgabe wesentlichen Komponenten
.
Die für die Messaufgabe wesentlichen Komponenten  und
und  ändern sich also durch die 10 %ige Störung von
überhaupt nicht.
ändern sich also durch die 10 %ige Störung von
überhaupt nicht.
Das ist in den folgenden zwei Bildern noch einmal veranschaulicht.
Die Konditionszahl der geränderten Matrix hat sich auf  verringert. Der relative Fehler wird sich durch die Berechnung von
verringert. Der relative Fehler wird sich durch die Berechnung von  aus den Messwerten
aus den Messwerten  also nur noch höchstens um ca. 15 % verschlechtern.
also nur noch höchstens um ca. 15 % verschlechtern.
In diesem motivierenden Beispiel wurde die Ränderung sehr einfach gehalten.
Durch eine geschicktere Wahl der Ränderung ist erreichbar, dass sich der
relative Fehler durch die Berechnung von
aus
überhaupt nicht mehr verschlechtert, dass also  gilt.
gilt.
Regularisierung
Sei
eine reelle  -Matrix
und
ein dazu passender
-Matrix
und
ein dazu passender  -dimensionaler
Spaltenvektor. Eine geränderte Matrix
-dimensionaler
Spaltenvektor. Eine geränderte Matrix

mit passenden Matrizen  und
und  ist genau dann regulär, wenn die Zeilen von
eine Basis des Kerns von
bilden und die Spalten von
ein minimales System von Spalten ist, das zusammen mit den Spalten von
den
ist genau dann regulär, wenn die Zeilen von
eine Basis des Kerns von
bilden und die Spalten von
ein minimales System von Spalten ist, das zusammen mit den Spalten von
den  aufspannt. In diesem Fall lässt sich das geränderte System
aufspannt. In diesem Fall lässt sich das geränderte System

eindeutig lösen und die Dimension der (quadratischen) geränderten Matrix ist
 (hierbei ist
(hierbei ist  der Defekt
von ).
der Defekt
von ).
Je nach Wahl der Matrizen
und
kann man verschiedene Aufgaben lösen. Spannen zum Beispiel die Zeilen von
den Kern
von
auf und die Spalten von
das orthogonale
Komplement des Bildes von ,
so ist
aus der Lösung des geränderten Gleichungssystems gerade  mit der Pseudoinversen
mit der Pseudoinversen
 von .
Den Kern von
kann man mit Hilfe des Gaußschen
Eliminationsverfahrens berechnen und das orthogonale Komplement des Bildes
von
berechnet man günstigerweise als Kern von
von .
Den Kern von
kann man mit Hilfe des Gaußschen
Eliminationsverfahrens berechnen und das orthogonale Komplement des Bildes
von
berechnet man günstigerweise als Kern von  .
.
Optimale Ränderung
Die Idee aus dem letzten Abschnitt wird hier aufgegriffen und eine beliebige
Matrix
so gerändert, dass die Spalten der erweiterten Matrix
alle senkrecht aufeinander stehen und die gleiche euklidische Norm
haben. Die erweiterte Matrix  ist dann das Produkt des größten Singulärwertes
von
mit einer orthogonalen Matrix und hat damit die minimal mögliche Konditionszahl
eins.
ist dann das Produkt des größten Singulärwertes
von
mit einer orthogonalen Matrix und hat damit die minimal mögliche Konditionszahl
eins.
Singulärwertzerlegung als Hilfsmittel zur Ränderung
Die Struktur der Systemmatrix kann man mit Hilfe einer aus der Singulärwertzerlegung
 von
gewonnenen Koordinatentransformation
von
gewonnenen Koordinatentransformation  ,
,
 vereinfachen. Die neue Systemmatrix
vereinfachen. Die neue Systemmatrix  hat dann sehr viele Nulleinträge. Nur die Elemente
hat dann sehr viele Nulleinträge. Nur die Elemente  sind mit Nichtnullelementen, nämlich den Singulärwerten
sind mit Nichtnullelementen, nämlich den Singulärwerten  ,
belegt. Hierbei ist
,
belegt. Hierbei ist  der Rang der Matrix .
der Rang der Matrix .
Die Transformationsmatrizen  und
und  sind orthogonal und damit normerhaltend
sind orthogonal und damit normerhaltend  ,
,
 .
Daraus folgt, dass die transformierte Systemmatrix
.
Daraus folgt, dass die transformierte Systemmatrix  die gleiche Kondition hat, wie die originale Systemmatrix .
die gleiche Kondition hat, wie die originale Systemmatrix .
Eine Erweiterung

der Matrix
um Matrixblöcke (zueinander passender Dimensionen)  entspricht eine Ränderung der Matrix ,
wenn man die Transformationsmatrizen
entspricht eine Ränderung der Matrix ,
wenn man die Transformationsmatrizen  und
und  passend durch Teile der Einheitsmatrix
ergänzt:
passend durch Teile der Einheitsmatrix
ergänzt:

Die erweiterten Transformationsmatrizen  und
und  sind wieder orthogonal, womit die Kondition der erweiterten Systemmatrix
mit der der Matrix
sind wieder orthogonal, womit die Kondition der erweiterten Systemmatrix
mit der der Matrix  übereinstimmt.
übereinstimmt.
Im Folgenden brauchen also nur noch Matrizen untersucht werden, die eine Systemmatrix mit der (von der Singulärwertzerlegung her bekannten) Struktur

mit einer ganzen Zahl  haben.
haben.
Ergänzung einer rechteckigen Matrix zu einer quadratischen
Hier wird nur die Ränderung von Matrizen mit mehr Zeilen als Spalten
beschrieben ( ).
Durch Transposition kann man die Aussagen auf Matrizen mit mehr Spalten als
Zeilen übertragen. Mit den Aussagen aus dem vorhergehenden
Abschnitt ist klar, dass man sich auf die Untersuchung von Matrizen der Form
).
Durch Transposition kann man die Aussagen auf Matrizen mit mehr Spalten als
Zeilen übertragen. Mit den Aussagen aus dem vorhergehenden
Abschnitt ist klar, dass man sich auf die Untersuchung von Matrizen der Form

beschränken kann, wobei  eine positiv semidefinite
Diagonalmatrix und
eine positiv semidefinite
Diagonalmatrix und  eine Nullmatrix mit der gleichen
Anzahl an Spalten wie
ist. Zunächst wird vorausgesetzt, dass
keine Nullmatrix ist. Das maximale Diagonalelement
eine Nullmatrix mit der gleichen
Anzahl an Spalten wie
ist. Zunächst wird vorausgesetzt, dass
keine Nullmatrix ist. Das maximale Diagonalelement  von
ist also größer null. Dann ist es günstig, die fehlenden Spalten durch die an
diese Spaltenpositionen gehörigen Spalten der mit
skalierten Einheitsmatrix zu ergänzen:
von
ist also größer null. Dann ist es günstig, die fehlenden Spalten durch die an
diese Spaltenpositionen gehörigen Spalten der mit
skalierten Einheitsmatrix zu ergänzen:

Falls
regulär ist, trifft das auch für die geränderte Matrix
zu. Man hat also die Matrix in diesem Falle regularisiert.
Nachdem man die Rechteckmatrix so zu einer quadratischen ergänzt hat, kann
man die im nächsten Abschnitt beschriebene Ränderung benutzen, um die Matrix
besser zu konditionieren (oder, falls
singulär ist, zu regularisieren). Dort wird sich herausstellen, dass die Wahl
von
als Skalierungsfaktor günstig ist, da man die Norm dieser Spalten dann nicht
mehr künstlich durch eine Ränderung vergrößern muss.
Optimale Ränderung einer quadratischen Matrix
Im vorhergehenden Abschnitt wurde beschrieben, wie man eine rechteckige Matrix durch Ränderung günstig zu einer quadratischen ergänzen kann. Hier wird nun darauf eingegangen, wie sich die Kondition einer quadratischen Matrix verbessern oder im singulären Fall die Matrix regularisieren lässt.
Der Unterabschnitt zur Singulärwertzerlegung
zeigt, dass man sich dabei auf die Ränderung von Diagonalmatrizen  beschränken kann.
beschränken kann.
Die Spaltenvektoren der Matrix
stehen bereits senkrecht aufeinander. Man muss sie nur noch geeignet verlängern,
damit sie normgleich werden. Dabei fängt man mit dem letzten Spaltenvektor an,
dessen Komponente  den kleinsten Wert der Diagonalelemente von
hat. Zunächst ergänzt man
durch eine Zeile
den kleinsten Wert der Diagonalelemente von
hat. Zunächst ergänzt man
durch eine Zeile  ,
was einer Erweiterung des Spaltenvektorraumes um eine Dimension entspricht (der
Punkt
,
was einer Erweiterung des Spaltenvektorraumes um eine Dimension entspricht (der
Punkt  steht hier als Stellvertreter für den Spaltenindex). In dieser zusätzlichen
Dimension verlängert man den letzten Spaltenvektor der erweiterten Matrix so
weit, dass er die gleiche euklidische Länge wie der erste (längste)
Spaltenvektor von
bekommt (also die Länge
steht hier als Stellvertreter für den Spaltenindex). In dieser zusätzlichen
Dimension verlängert man den letzten Spaltenvektor der erweiterten Matrix so
weit, dass er die gleiche euklidische Länge wie der erste (längste)
Spaltenvektor von
bekommt (also die Länge  ):
):

Die Spaltenvektoren der erweiterten Matrix  bleiben dadurch orthogonal zueinander. Um wieder eine quadratische Matrix zu
erhalten, muss man noch eine Spalte
bleiben dadurch orthogonal zueinander. Um wieder eine quadratische Matrix zu
erhalten, muss man noch eine Spalte  ergänzen. Dazu wählt man günstigerweise eine Spalte mit
ergänzen. Dazu wählt man günstigerweise eine Spalte mit

Die Spalte
hat die gewünschte Norm
und steht wiederum senkrecht auf allen anderen Spalten der erweiterten Matrix
 .
.
Durch analoges Ergänzen weiterer Zeilen und Spalten kann man sukzessive die Norm aller Spaltenvektoren der erweiterten Matrix angleichen. Wie gewünscht, ist das Ergebnis eine Systemmatrix, deren Spalten alle orthogonal aufeinander stehen und die gleiche Norm haben.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 15.03. 2023