Beschleunigtes Bezugssystem
Beschleunigte Bezugssysteme sind alle Bezugssysteme, die kein Inertialsystem sind.
Obwohl in beschleunigten Bezugssystemen die physikalischen Gesetze im Allgemeinen komplizierter aussehen (in der Mechanik müssen z.B. bei der Aufstellung von Bewegungsgleichungen Trägheitskräfte berücksichtigt werden), können diese Bezugssysteme in manchen Fällen die Lösung eines Problems vereinfachen.
Das ist meist dann der Fall, wenn das Bezugssystem so gewählt wird, dass die Bewegungen relativ dazu einfach werden:
- Rotierende Kreis- oder Spiralbewegungen um ein gemeinsames Zentrum lassen sich z.B. oft gut beschreiben, wenn das Bezugssystem um das Zentrum gleichförmig rotiert: Der kreiselnde bzw. spiralende Körper ruht dann darin oder bewegt sich entlang einer Geraden.
- Das Foucaultsche Pendel wird meist in einem Bezugssystem berechnet, das die Erddrehung mitvollführt. Ebenso die Berechnungen für die Vorgänge in Atmosphäre und Ozeanen, auf denen die Vorhersage des Wetters und der Klimaentwicklung aufbauen.
- Relativbewegungen in einem Fahrzeug, z.B. die der Räder, werden in einem fahrzeugfesten System beschrieben.
- In einem Bezugssystem, das in einem homogenen Schwerkraftfeld im freien Fall ist, wird die Schwerkraft durch die Trägheitskraft exakt ausgeglichen.
In der Klassischen Mechanik sind Zeitintervalle und räumliche Abstände in allen Bezugssystemen gleich. Die Umrechnung der wahrgenommenen physikalischen Größen beim Übergang zu einem anderen Bezugssystem wird daher durch die Euklidische Transformation bewerkstelligt.
Kinematik
Zeitliche Ableitungen in einem ruhenden und einem bewegten Bezugssystem
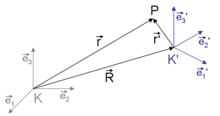
Sei P ein Punkt im physikalischen Raum. In einem Bezugssystem  ist er durch einen Ortsvektor
ist er durch einen Ortsvektor
 definiert, der mit drei Basisvektoren
definiert, der mit drei Basisvektoren
 (
(  für die x-, y- und z-Richtung) und drei Koordinaten
für die x-, y- und z-Richtung) und drei Koordinaten  so darzustellen ist:
so darzustellen ist:

Ist der Punkt beweglich, hängen die Koordinaten  von der Zeit ab.
von der Zeit ab.
Die zeitliche Ableitung des Vektors ist

Sie gibt die Geschwindigkeit an, mit der sich der Punkt P relativ zum
Bezugssystem
bewegt.
Sei  ein anderes Bezugssystem, das sich relativ zu
bewegt. Sein Koordinatenursprung
liegt bei
ein anderes Bezugssystem, das sich relativ zu
bewegt. Sein Koordinatenursprung
liegt bei  ,
seine Basisvektoren sind
,
seine Basisvektoren sind  .
Der Ortsvektor desselben Punktes P in K' sei
.
Der Ortsvektor desselben Punktes P in K' sei  .
Damit die Vektoren
und
denselben physikalischen Ort im Raum definieren, muss gelten:
.
Damit die Vektoren
und
denselben physikalischen Ort im Raum definieren, muss gelten:
 .
.
Im Fall  sind also die Vektoren gleich (
sind also die Vektoren gleich ( ),
aber ihre Komponenten bezüglich
bzw.
im Allgemeinen nicht.
),
aber ihre Komponenten bezüglich
bzw.
im Allgemeinen nicht.
Die Komponentendarstellung von
in Bezug auf
ist:
 .
.
Die zeitliche Ableitung des Vektors
relativ zum bewegten System
ist

Dabei bedeutet der Strich im Symbol  für die Differentiation eines Vektors
für die Differentiation eines Vektors  ,
dass die Koordinaten
,
dass die Koordinaten  abgeleitet werden sollen, die er im Bezugssystem
hat, damit die Ableitung eine Größe bezeichnet, wie sie dort beobachtet werden
kann.
abgeleitet werden sollen, die er im Bezugssystem
hat, damit die Ableitung eine Größe bezeichnet, wie sie dort beobachtet werden
kann.
Um die Geschwindigkeiten des Punktes P, wie sie in
bzw. in
beobachtet werden, zueinander in Beziehung zu setzen, muss die Bewegung von
in Bezug auf
beschrieben werden. Diese Bewegung ist wie bei einem starren
Körper in jedem Moment die Kombination einer Translationsbewegung und einer
Rotationsbewegung. Die Translationsbewegung ist durch die Geschwindigkeit
gegeben, mit der der Ursprung
sich in
bewegt:
 .
.
Aufgrund der Translationsbewegung bewegen sich alle Punkte mit konstantem
Ortsvektor
in
parallel, also bleiben auch die Basisvektoren  zeitlich konstant. Aufgrund der Rotationsbewegung ändern diese sich aber. Die
momentane Rotationsbewegung von
hat eine Drehachse durch den Ursprung am Ort
und eine Winkelgeschwindigkeit
zeitlich konstant. Aufgrund der Rotationsbewegung ändern diese sich aber. Die
momentane Rotationsbewegung von
hat eine Drehachse durch den Ursprung am Ort
und eine Winkelgeschwindigkeit  ,
die mit dem Drehsinn zur vektoriellen Winkelgeschwindigkeit
,
die mit dem Drehsinn zur vektoriellen Winkelgeschwindigkeit
 zusammengefasst sind. (Umgekehrt hat
in
seinen Ursprung bei
zusammengefasst sind. (Umgekehrt hat
in
seinen Ursprung bei  und dreht sich mit
und dreht sich mit  .)
Damit ändern sich die Basisvektoren von
in
mit der Geschwindigkeit
(siehe Bahngeschwindigkeit):
.)
Damit ändern sich die Basisvektoren von
in
mit der Geschwindigkeit
(siehe Bahngeschwindigkeit):

Damit kann die Zeitableitung des Vektors ,
wie sie im Bezugssystem
erscheint, berechnet werden. Nach der Produktregel
ist
 .
.
Nach den obigen Formeln ist das dasselbe wie
 .
.
Diese Formel wird oft zu einer Operatorgleichung abgekürzt wiedergegeben als
 .
.
Angewendet auf einen beliebigen Vektor (einzusetzen bei  ),
liefert sie den Zusammenhang zwischen seinen Änderungsgeschwindigkeiten
bzw. in .
),
liefert sie den Zusammenhang zwischen seinen Änderungsgeschwindigkeiten
bzw. in .
Transformation der Geschwindigkeit
Im Folgenden werden, in Anlehnung an die Technische
Mechanik, die im Bezugssystem
beobachteten Größen als Absolutgeschwindigkeit bzw.
Absolutbeschleunigung bezeichnet, und die auf
bezogenen Größen als Relativgeschwindigkeit bzw.
Relativbeschleunigung.[1]
Die Absolutgeschwindigkeit  des Punktes ist:
des Punktes ist:

Die Relativgeschwindigkeit  des Punktes ist analog:
des Punktes ist analog:

Wegen
folgt für die Absolutgeschwindigkeit :
 .
.
Der Anteil ( )
der Absolutgeschwindigkeit wird als Führungsgeschwindigkeit bezeichnet.
Alle Punkte, die im Bezugssystem
ruhen, bewegen sich im Bezugssystem
mit der Führungsgeschwindigkeit. Falls sie in
nicht ruhen, ist ihre Relativgeschwindigkeit
)
der Absolutgeschwindigkeit wird als Führungsgeschwindigkeit bezeichnet.
Alle Punkte, die im Bezugssystem
ruhen, bewegen sich im Bezugssystem
mit der Führungsgeschwindigkeit. Falls sie in
nicht ruhen, ist ihre Relativgeschwindigkeit  zur Führungsgeschwindigkeit zu addieren.
zur Führungsgeschwindigkeit zu addieren.
Transformation der Beschleunigung
Die zeitliche Ableitung der Formel für die Geschwindigkeit des Punktes P in
ergibt die Absolutbeschleunigung, ausgedrückt durch die in
beobachtbaren Größen  und :
und :

Dabei muss die obige Operatorgleichung je einmal auf
und
angewendet werden. Die Größen nach den vorstehenden Formeln eingesetzt und etwas
umgeordnet:

oder

Darin ist:
 |
Relativbeschleunigung in Bezug zu
|
 |
Translationsbeschleunigung von
in
|
 |
Zentrifugalbeschleunigung
in
|
 |
Coriolisbeschleunigung
in
|
 |
Eulerbeschleunigung
in
|
Am Ergebnis ist zu sehen: Wenn ein Punkt in einem Bezugssystem beispielsweise ruht oder sich geradlinig gleichförmig bewegt, kann er im Allgemeinen in einem anderen Bezugssystem mit (von Null verschiedener) Geschwindigkeit und sogar Beschleunigung beobachtet werden. Die Unterschiede in der beobachteten Beschleunigung werden als Wirkung von Trägheitskräften aufgefasst. Weiteres siehe dort.
Dynamik
Wenn K ein Inertialsystem
ist, dann ist Beschleunigung  proportional zu der auf den Massenpunkt wirkende Kraft
proportional zu der auf den Massenpunkt wirkende Kraft  :
:
 .
.
Einsetzen der obigen Gleichung für  führt auf die Gleichung:
führt auf die Gleichung:

Darin ist:
 |
Kraft zur Erzeugung der Relativbewegung in K' , wenn K' ein Inertialsystem wäre |
 |
Kraft zur Erzeugung der Translationsbeschleunigung von K' in K |
 |
Zentrifugalkraft |
 |
Corioliskraft |
 |
Eulerkraft |
Diese Gleichung lässt sich auf verschiedene Weise anwenden:
- Zusammengesetzte Bewegung: Wenn die Bewegung eines Massenpunkts als
eine bestimmte Relativbewegung in einem beschleunigten Bezugssystem K'
gegeben ist, dann ergibt sich die dazu nötige Kraft
aus obiger Gleichung. Man sieht, dass außer der Kraft
 ,
die die gegebene Relativbewegung in einem Inertialsystem hervorrufen würde,
weitere Kräfte erforderlich sind. Diese werden als Trägheitskräfte
bezeichnet, weil sie sich aus der Trägheit des bewegten Massenpunkts gegenüber
der Führungsbeschleunigung des Bezugssystems K' ergeben.
,
die die gegebene Relativbewegung in einem Inertialsystem hervorrufen würde,
weitere Kräfte erforderlich sind. Diese werden als Trägheitskräfte
bezeichnet, weil sie sich aus der Trägheit des bewegten Massenpunkts gegenüber
der Führungsbeschleunigung des Bezugssystems K' ergeben. - Scheinkräfte: Wenn eine Bewegung
relativ zu einem beschleunigten Bezugssystem K' beobachtet wird, dann
kann man die wirkende Kraft nicht allein aus
 erschließen, sondern muss nach obiger Gleichung zu
die Trägheitskräfte addieren. Diese können je nach Art der Beschleunigung von
K' verschieden sein und werden nicht durch die Wirkung andere Körper
verursacht.
erschließen, sondern muss nach obiger Gleichung zu
die Trägheitskräfte addieren. Diese können je nach Art der Beschleunigung von
K' verschieden sein und werden nicht durch die Wirkung andere Körper
verursacht. - Newtonsche Mechanik im beschleunigten Bezugssystem: Auch in einem
beschleunigten Bezugssystem lässt sich die Bahn
eines Körpers aus der newtonschen Grundgleichung
ermitteln, indem man für
diejenige effektive Kraft einsetzt, die sich nach obiger Gleichung aus der
äußeren Kraft
und den Trägheitskräften ergibt:
-
- Im Folgenden werden verschiedene Spezialfälle hiervon diskutiert:

Beschleunigte Translationsbewegung
Hier gilt  ,
so dass sich die Bewegungsgleichung vereinfacht zu:
,
so dass sich die Bewegungsgleichung vereinfacht zu:

Dies ist z.B. der Fall eines mit einem geradlinig bewegten Fahrzeug
verbundenen Bezugssystems. Im einfachsten Fall ist  ,
etwa wenn das Gewicht des Körpers durch die Auflagefläche kompensiert wird. Es
gilt dann
,
etwa wenn das Gewicht des Körpers durch die Auflagefläche kompensiert wird. Es
gilt dann  ,
d.h. die auf das Fahrzeug bezogene Beschleunigung ist genau
entgegengesetzt zur Beschleunigung des Fahrzeugs. Beim Bremsen bewegt sich der
Körper im Fahrzeug nach vorn, beim Anfahren nach hinten (z.B. Autofahren:
„Kopfnicker“ beim ruckartigen Bremsen oder Anfahren).
,
d.h. die auf das Fahrzeug bezogene Beschleunigung ist genau
entgegengesetzt zur Beschleunigung des Fahrzeugs. Beim Bremsen bewegt sich der
Körper im Fahrzeug nach vorn, beim Anfahren nach hinten (z.B. Autofahren:
„Kopfnicker“ beim ruckartigen Bremsen oder Anfahren).
Rotierendes Bezugssystem
Es soll  gelten, d.h. der Ursprung von K' bewegt sich nicht oder nur
gleichförmig geradlinig gegenüber K:
gelten, d.h. der Ursprung von K' bewegt sich nicht oder nur
gleichförmig geradlinig gegenüber K:

Bezugssystem an der Erdoberfläche
Die Winkelgeschwindigkeit der Erde ist konstant, d.h.  .
Hier rotiert
.
Hier rotiert  (= Vektor vom Erdmittelpunkt zum Ursprung von K' an der Erdoberfläche)
mit derselben Winkelgeschwindigkeit wie K' :
(= Vektor vom Erdmittelpunkt zum Ursprung von K' an der Erdoberfläche)
mit derselben Winkelgeschwindigkeit wie K' :

Stellt man
bzgl. K' dar, so ergibt die zweite Zeitableitung (
ist bzgl. K' konstant):

Somit ergibt sich die Bewegungsgleichung:

Für Bewegungen, die in der Nähe der Erdoberfläche verlaufen, kann man den
letzten Term vernachlässigen, da hier  gilt.
gilt.
Setze als Kraft die Gewichtskraft
 ein:
ein:

Man fasst normalerweise die Gravitationsbeschleunigung
( wirkt in radiale Richtung) und die Beschleunigung des Ursprungs des
Bezugssystems (
wirkt in radiale Richtung) und die Beschleunigung des Ursprungs des
Bezugssystems ( wirkt senkrecht zur Erdachse) zusammen zu einer effektiven Schwerebeschleunigung
(die Richtung folgt aus der Vektorsummenbildung). Da die
Zentrifugalbeschleunigung von der geographischen Breite abhängt (an den Polen
Null und am Äquator maximal), ist die effektive Schwerebeschleunigung von der
geographischen Breite abhängig; die Erdoberfläche ist näherungsweise eine Äquipotentialfläche
der effektiven Schwerebeschleunigung, nämliche ein Ellipsoid, das im
Vergleich zur Kugel an den Polen abgeplattet ist.
wirkt senkrecht zur Erdachse) zusammen zu einer effektiven Schwerebeschleunigung
(die Richtung folgt aus der Vektorsummenbildung). Da die
Zentrifugalbeschleunigung von der geographischen Breite abhängt (an den Polen
Null und am Äquator maximal), ist die effektive Schwerebeschleunigung von der
geographischen Breite abhängig; die Erdoberfläche ist näherungsweise eine Äquipotentialfläche
der effektiven Schwerebeschleunigung, nämliche ein Ellipsoid, das im
Vergleich zur Kugel an den Polen abgeplattet ist.  bestimmt die Vertikale von der Erdoberfläche, die von der radialen Richtung
etwas abweicht.
bestimmt die Vertikale von der Erdoberfläche, die von der radialen Richtung
etwas abweicht.
Man betrachte ein mitbewegtes Koordinatensystem K' auf der Erdoberfläche, das
so ausgerichtet ist, dass  in Richtung Osten,
in Richtung Osten,  in Richtung Norden und
in Richtung Norden und  zum Zenit zeigt. Die Winkelgeschwindigkeit der Erde lautet in K', wobei
zum Zenit zeigt. Die Winkelgeschwindigkeit der Erde lautet in K', wobei  die geographische Breite ist,
die geographische Breite ist,

Somit lautet die Coriolisbeschleunigung

Siehe auch
Anmerkungen
- ↑ Diese Wortwahl bedeutet nicht, dass es in der klassischen Mechanik so etwas wie "absolute Ruhe" oder "absolute Geschwindigkeit" gäbe. Siehe Relativitätsprinzip.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.01. 2020