Elektromagnetische Induktion
Unter elektromagnetischer Induktion (auch Faradaysche Induktion, nach Michael Faraday, kurz Induktion) versteht man das Entstehen eines elektrischen Feldes bei einer Änderung des magnetischen Flusses.
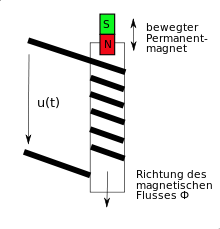
In vielen Fällen lässt sich das elektrische Feld durch Messung einer elektrischen Spannung direkt nachweisen. Ein typisches Beispiel hierfür zeigt das nebenstehende Bild: Durch die Bewegung des Magneten wird eine elektrische Spannung induziert, die an den Klemmen der Spule messbar ist und für weitere Anwendungen bereitsteht.
Die elektromagnetische Induktion wurde 1831 von Michael Faraday bei dem Bemühen entdeckt, die Funktionsweise eines Elektromagneten (Strom erzeugt Magnetfeld) umzukehren (Magnetfeld erzeugt Strom). Der Zusammenhang ist eine der vier Maxwellschen Gleichungen. Die Induktionswirkung wird technisch vor allem bei elektrischen Maschinen wie Generatoren, Elektromotoren und Transformatoren genutzt. Bei diesen Anwendungen treten stets Wechselspannungen auf.
Geschichtliche Entwicklung

Die elektromagnetische Induktion als Teil der Maxwellschen Gleichungen und der klassischen Elektrodynamik spiegelt den Kenntnisstand zum Ende des 19. Jahrhunderts wider. Zum damaligen Zeitpunkt wurden teilweise andere Begriffe und Formelzeichen benutzt, die grundlegenden Vorstellungen über den Induktionsvorgang wurden jedoch zu dieser Zeit geschaffen.
Als Entdecker des Induktionsgesetzes gelten Michael Faraday, Joseph Henry und Hans Christian Ørsted, die das Induktionsgesetz im Jahr 1831 unabhängig voneinander formulierten, wobei Faraday seine Ergebnisse als Erster veröffentlichte.
In Faradays erstem Demonstrationsaufbau zur Induktion vom 29. August 1831 wickelte er zwei Leiterdrähte auf die gegenüberliegenden Seiten eines Eisenkerns; eine Anordnung, die modernen Ringkerntransformatoren ähnelt. Er erwartete aufgrund seiner Kenntnisse über Permanentmagnete, dass sich – sobald in einer der beiden Leitungen ein Strom zu fließen beginnt – eine Welle entlang des Rings ausbreitet und zu einem Stromfluss in der Leitung auf der anderen Seite des Rings führt. Im Experiment schloss er an einer der beiden Leitungen ein Galvanometer an und beobachtete jedes Mal einen kurzen Zeigerausschlag, wenn er den anderen Draht an eine Batterie anschloss. Die Ursache dieser Induktionserscheinung war die Änderung des magnetischen Flusses in der von der Leiterschleife aufgespannten Fläche. In der folgenden Zeit identifizierte Faraday weitere Beispiele elektromagnetischer Induktion. So beobachtete er Ströme wechselnder Richtung, wenn er einen Permanentmagneten rasch in eine Spule hinein und wieder heraus bewegte. Aus den historischen Untersuchungen ging auch die sogenannte Faradayscheibe, ein Gleichstromgenerator, hervor, die aus heutiger Sicht als sogenannte Bewegungsinduktion beschrieben wird und ihre Ursache in der Bewegung des Leiters und der mitgeführten Ladungen im magnetischen Feld hat. Faraday veröffentlichte das Gesetz, beginnend mit “The relation which holds between the magnetic pole, the moving wire or metal, and the direction of the current evolved, i.e. the law which governs the evolution of electricity by magneto-electric induction, is very simple, although rather difficult to express.” (deutsch: „Die Beziehung, die zwischen dem magnetischen Pol, dem sich bewegenden Draht oder Metall und der Richtung des fließenden Stroms besteht, d.h., das Gesetz, das die Entstehung der Elektrizität durch magnetisch-elektrische Induktion beherrscht, ist sehr einfach, jedoch ziemlich schwer auszudrücken.“)
Bedeutende Beiträge stammten auch von Emil Lenz (Lenzsche Regel), Franz Ernst Neumann und Riccardo Felici.
Anfang des 20. Jahrhunderts erfolgte die relativistische Eingliederung des Induktionsgesetzes im Rahmen der speziellen Relativitätstheorie. Anders als in der Mechanik, bei der sich die spezielle Relativitätstheorie erst bei Geschwindigkeiten nahe der Lichtgeschwindigkeit merklich auswirkt, sind relativistische Effekte in der Elektrodynamik schon bei sehr kleinen Geschwindigkeiten zu beobachten. So konnte im Rahmen der Relativitätstheorie beschrieben werden, wie sich beispielsweise die Beträge der elektrischen und magnetischen Feldkomponenten in Abhängigkeit von der Bewegung zwischen einem Beobachter und einer beobachteten elektrischen Ladung verändern. Diese Abhängigkeiten in der relativen Bewegung zueinander zwischen verschiedenen Bezugssystemen werden durch die Lorentz-Transformation beschrieben. Dabei zeigt sich, dass das Induktionsgesetz in Kombination mit den restlichen Maxwellschen Gleichungen „lorentzinvariant“ ist. Das heißt, die Struktur der Gleichungen wird durch die Lorentztransformation zwischen verschiedenen Bezugssystemen nicht verändert. Dabei wird deutlich, dass die elektrischen und magnetischen Felder nur zwei Erscheinungsformen desselben Phänomens sind.
Allgemeines
Bei der durch Induktion infolge einer magnetischen Flussdichteänderung entstehenden elektrischen Spannung handelt es sich um eine sogenannte Umlaufspannung. Eine solche Umlaufspannung tritt nur in Feldern mit einem sogenannten Wirbelanteil auf, d.h. in Feldern, bei denen Feldlinien nicht an einem bestimmten Punkt im Raum enden, sondern sich beispielsweise im Kreis drehen oder „im Unendlichen“ verschwinden. Hierdurch unterscheidet sich die Induktionsspannung von Spannungen, wie sie beispielsweise bei einer Batterie vorkommen (Potentialfeld). Die Feldlinien der sog. Urspannungsquellen EMK einer Batterie (siehe elektromotorische Kräfte) verlaufen stets von positiven zu negativen Ladungen und sind daher niemals geschlossen.
In mathematischer Form lässt sich das Induktionsgesetz durch jede der folgenden drei Gleichungen beschreiben:
| Differentielle Form | Integralform I | Integralform II |
|---|---|---|

|

|

|
In den Gleichungen steht  für die elektrische
Feldstärke und
für die elektrische
Feldstärke und  für die magnetische
Flussdichte. Die Größe
für die magnetische
Flussdichte. Die Größe  ist das orientierte Flächenelement und
ist das orientierte Flächenelement und  der Rand (die Konturlinie) der betrachteten Integrationsfläche
der Rand (die Konturlinie) der betrachteten Integrationsfläche  ;
;
 ist die lokale Geschwindigkeit der Konturlinie in Bezug auf das zugrundeliegende
Bezugssystem. Das auftretende Linienintegral führt
entlang einer geschlossenen Linie
und endet daher am Startpunkt. Ein Multiplikationspunkt zwischen zwei Vektoren
markiert deren Skalarprodukt.
ist die lokale Geschwindigkeit der Konturlinie in Bezug auf das zugrundeliegende
Bezugssystem. Das auftretende Linienintegral führt
entlang einer geschlossenen Linie
und endet daher am Startpunkt. Ein Multiplikationspunkt zwischen zwei Vektoren
markiert deren Skalarprodukt.
Alle Größen müssen sich auf dasselbe Bezugssystem beziehen.
Grundlegende Experimente
Im Folgenden werden mehrere beliebte Experimente zur Demonstration der elektromagnetischen Induktion beschrieben.
Ein grundlegendes Induktionsexperiment wird schon im Einleitungstext aufgegriffen. Bewegt man den im Einleitungstext dargestellten Permanentmagneten in der Spule auf und ab, so lässt sich an den Klemmen der Spule mit dem Oszilloskop eine elektrische Spannung abgreifen.
Dieses Prinzip wird beim Transformator genutzt, dessen Funktionsprinzip im nebenstehenden Bild skizziert wird: Schließt man den Batteriestromkreis in der linken Wicklung (Primärwicklung), so entstehen kurzzeitig im Eisenkern ein sich veränderndes magnetisches Feld und in der rechten Wicklung (Sekundärwicklung) eine elektrische Spannung, die beispielsweise mithilfe eines Voltmeters oder einer Glühlampe nachgewiesen werden kann. Öffnet man den Batteriestromkreis auf der linken Seite wieder, entsteht in der rechten Wicklung erneut eine elektrische Spannung. Diese hat jedoch ein umgekehrtes Vorzeichen.

Sofern der Eisenkern elektrisch leitfähig ist, können schon im Kern elektrische Ströme induziert werden, die den Eisenkern erhitzen (siehe Bild „Erhitzung einer Metallstange“). Dies versucht man bei Transformatoren zu vermeiden, indem man geblechte Kerne verwendet, die dem Strom einen höheren Widerstand entgegensetzen.
Die Erzeugung einer elektrischen Spannung lässt sich auch durch Bewegung der Leiter erzeugen. So lässt sich an den Klemmen einer Leiterschleife oder einer Spule eine elektrische Wechselspannung abgreifen, wenn man die Leiterschleife in einem zeitlich konstanten Magnetfeld dreht, wie im Abschnitt Leiterschleife im Magnetfeld gezeigt. Nach dem dort gezeigten Prinzip (aber einer grundlegend verbesserten Anordnung) funktionieren die in Kraftwerken eingesetzten Generatoren zur Bereitstellung elektrischer Energie im Stromversorgungsnetz. In dem gezeigten Experiment kann die Wirkungsrichtung grundsätzlich umgedreht werden: Legt man an die Klemmen der drehbar gelagerten Leiterschleife eine elektrische Wechselspannung, so dreht sich die Leiterschleife um ihre Achse im magnetischen Feld (Synchronmotor).
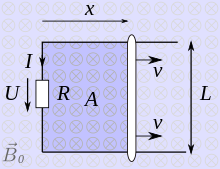
Die Bewegung eines Leiters im Magnetfeld kann auch genutzt werden, um eine elektrische Gleichspannung zu erzeugen. Dies ist beispielhaft im Abschnitt Induktion durch Bewegung des Leiters gezeigt. Bewegt man den Leiterstab entlang der Schienen, die durch einen Schleifkontakt oder durch Räder elektrisch mit dem Leiterstab verbunden sind, so lässt sich am Voltmeter eine Gleichspannung messen, die von der Geschwindigkeit des Leiterstabes, der magnetischen Flussdichte und dem Abstand der Schienen abhängt.
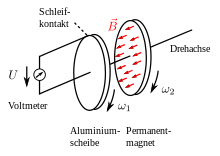
Anstelle einer Linearbewegung lässt sich das Experiment auch mit einer Drehbewegung demonstrieren, wie am Beispiel der Faradayscheibe (Bild rechts) gezeigt. Im dargestellten Experiment übernimmt die Aluminiumscheibe die Funktion des bewegten Leiterstabes aus dem Experiment mit dem bewegten Leiterstab im Magnetfeld.
Dreht man die Aluminiumscheibe im magnetischen Feld, so lässt sich zwischen
Schleifkontakt am äußeren Rand der Aluminiumscheibe und der Drehachse eine
elektrische Spannung nachweisen, mit der sich beispielsweise auch eine Glühlampe
betreiben lässt. Die Spannung an den Klemmen hängt dabei von der Stärke der
magnetischen Flussdichte, der Drehgeschwindigkeit  und dem Durchmesser der Scheibe ab.
und dem Durchmesser der Scheibe ab.
Zum großen Erstaunen Faradays weist ein solcher Unipolargenerator
jedoch unerwartete Eigenschaften auf, die in der Literatur noch lange nach
Faradays Entdeckung diskutiert wurden und zu einer lange anhaltenden Kontroverse
um die Frage führte, ob man dem Magnetfeld gleichsam wie einem materiellen
Objekt eine Geschwindigkeit zuordnen könne und konkret, ob sich das Magnetfeld
mit dem Magneten mitdreht.
Die wesentliche Entdeckung war, dass die Spannung entgegen einer naheliegenden
intuitiven Annahme nachweislich nicht von der Relativbewegung zwischen dem
Permanentmagneten und der Aluminiumscheibe abhängt. Denn dreht man im
dargestellten Experiment beispielsweise nur den Permanentmagneten und lässt die
Aluminiumscheibe ruhen ( ),
so ist trotz der vorhandenen Relativbewegung zwischen Magnet und Leiter keine
Spannung zu beobachten. Dreht man hingegen beide Scheiben mit der gleichen
Geschwindigkeit (
),
so ist trotz der vorhandenen Relativbewegung zwischen Magnet und Leiter keine
Spannung zu beobachten. Dreht man hingegen beide Scheiben mit der gleichen
Geschwindigkeit ( ),
so zeigt sich eine Spannung an, obwohl die beiden Scheiben sich relativ
zueinander nicht bewegen. Ebenso ist eine Spannungsanzeige zu beobachten, wenn
man die Spannung anstelle an der Aluminiumscheibe direkt an dem als elektrisch
leitfähig angenommenen Permanentmagneten abgreift.
),
so zeigt sich eine Spannung an, obwohl die beiden Scheiben sich relativ
zueinander nicht bewegen. Ebenso ist eine Spannungsanzeige zu beobachten, wenn
man die Spannung anstelle an der Aluminiumscheibe direkt an dem als elektrisch
leitfähig angenommenen Permanentmagneten abgreift.
Das Prinzip ist ebenfalls umkehrbar und lässt stromdurchflossene Magnetscheiben kreiseln, .
Obwohl die Kontroverse um diese Frage im Rahmen der speziellen Relativitätstheorie Einsteins aufgeklärt werden kann[1] und es erwiesenermaßen nicht auf die Relativgeschwindigkeit zwischen Magnet und Leiter ankommt, wird im schulischen Unterricht auch heute teilweise noch das sogenannte Igelmodell des Magnetfeldes verwendet, dem zufolge die magnetischen Feldlinien wie Igelstacheln an dem Magneten befestigt seien. Induktion trete dem Modell entsprechend immer dann ein, wenn der Leiter die Feldlinien „schneide“ (Relativbewegung zwischen Leiter und Magnetfeld). Im Rahmen der Seminarlehrertagung „Physik“ in Dillingen 2002 wies Hübel ausdrücklich auf die mit dem Igelmodell verbundenen Schwierigkeiten hin und betonte, das Igelmodell solle nicht als kausale Erklärung der Induktion missverstanden werden; es sei vielmehr nicht haltbar und könne zu falschen Vorstellungen führen.
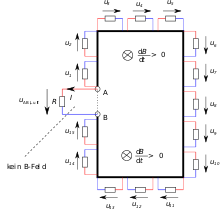
Eine ähnlich häufige Fehlvorstellung wie das Igelstachelmodell betrifft die Annahme, induktive Vorgänge ließen sich mit der Kirchhoff'schen Maschengleichung erklären. Diese besagt, dass die Summe aller Spannungen in einem Stromkreis "einmal im Kreis herum" immer null ergibt. Aus dem Induktionsgesetz lässt sich für ruhende Stromkreise hingegen folgern, dass die Summe aller Spannungen "einmal im Kreis herum" der Änderung des magnetischen Flusses entspricht, die in der vom Stromkreis aufgespannten Fläche auftritt.
Das nebenstehende Bild zeigt zur Verdeutlichung eine Leiterschleife bestehend
aus einem guten Leiter (schwarze Linie) und einem Widerstand R, der zur Messung
der Spannung zwischen den Klemmen A und B genutzt wird. Im Bereich innerhalb des
Rechtecks (bestehend aus dem Leiter und der gestrichelten Verbindung zwischen
den Punkten A und B) existiert ein Magnetfeld, dessen zeitliche Ableitung  eine Zeitlang homogen und zeitlich konstant ist.
eine Zeitlang homogen und zeitlich konstant ist.
Misst man die Spannung zwischen den Klemmen A und B entlang einer Strecke
durch die Luft, so ergibt sich ein von Null verschiedener Wert, der von der
Flussänderung der umschlossenen Fläche abhängt: 
Misst man die Spannung zwischen den Klemmen A und B hingegen entlang einer
Strecke durch den Draht, so ergibt sich der Wert null:  ,
da im Draht aufgrund des geringen Stromflusses und der guten Leitfähigkeit ein
verschwindendes E-Feld herrscht und somit gilt:
,
da im Draht aufgrund des geringen Stromflusses und der guten Leitfähigkeit ein
verschwindendes E-Feld herrscht und somit gilt: 
Der Begriff der „Spannung zwischen zwei Punkten“ ist bei Induktion nicht mehr eindeutig und muss durch die Angabe des Weges ergänzt werden (vgl. Wirbelfeld).
Induktion bei einer Leiterschleife
Allgemeine Formulierung des Induktionsgesetzes für eine Leiterschleife
Obwohl die allgemeine Formulierung des Induktionsgesetzes keine Leiterschleife erfordert, soll zunächst wie in vielen einführenden Lehrbüchern üblich die Induktion an einer aus dünnem, gut leitfähigem Draht bestehenden Leiterschleife betrachtet werden. Hierdurch lassen sich eine große Anzahl technischer Anwendungen wie beispielsweise Motoren und Generatoren für Dreh- und Wechselstrom beschreiben und verstehen, ohne dass dazu eine Behandlung der relativistischen Aspekte der Feldtheorie oder die Anwendung der Lorentztransformation erforderlich wäre.
Für die zwischen beiden Drahtenden mit einem im Laborsystem ruhenden oder
auch bewegten Messgerät (beispielsweise mit einem Oszilloskop)
messbare elektrische Spannung  ergibt sich unter den Voraussetzungen, die im nebenstehenden Bild gekennzeichnet
sind:
ergibt sich unter den Voraussetzungen, die im nebenstehenden Bild gekennzeichnet
sind:

Hierbei ist  der magnetische
Fluss
der magnetische
Fluss

der durch eine (beliebige) von der Leiterschleife, den Zuleitungen zum
Messgerät und den Leitungen im Messgerät begrenzte Fläche  hindurchtritt. Es kann gezeigt werden, dass es bei der Berechnung des Flusses
nicht auf die Form der Fläche, sondern ausschließlich auf deren Berandung
ankommt. Ebenso ist es bei der Rechnung nicht notwendig zu unterscheiden, ob die
elektrische Spannung der Anordnung durch eine Änderung der Flussdichte oder
durch eine Bewegung des Leiters erzeugt wird.
hindurchtritt. Es kann gezeigt werden, dass es bei der Berechnung des Flusses
nicht auf die Form der Fläche, sondern ausschließlich auf deren Berandung
ankommt. Ebenso ist es bei der Rechnung nicht notwendig zu unterscheiden, ob die
elektrische Spannung der Anordnung durch eine Änderung der Flussdichte oder
durch eine Bewegung des Leiters erzeugt wird.
Bei der Festlegung des Vorzeichens in der Gleichung  ist zu beachten, dass das Vorzeichen sowohl von der Einbaurichtung des
Messgerätes, als auch von der Flächenorientierung abhängt[2]
und daher immer zusammen mit dem zugehörigen Schaltbild gelesen werden muss.
ist zu beachten, dass das Vorzeichen sowohl von der Einbaurichtung des
Messgerätes, als auch von der Flächenorientierung abhängt[2]
und daher immer zusammen mit dem zugehörigen Schaltbild gelesen werden muss.
Die Flächenorientierung ist im Schaltbild durch den eingezeichneten Pfeil
beim Flächenelement
gekennzeichnet. Der Pfeil
bei der Spannungsangabe
definiert wiederum die Einbaurichtung des Messgerätes. Die vorliegende
Bepfeilung bei der Spannung (Pfeil zeigt von oben nach unten) bedeutet, dass an
der oberen Anschlussklemme das rote Anschlusskabel des
Digitalvoltmeters
und an der unteren Anschlussklemme das schwarze Anschlusskabel des
Digitalvoltmeters
angeschlossen wird. Würde man das Messgerät herumdrehen (Spannungspfeil von
unten nach oben) oder die Flächenorientierung umgekehrt wählen, so würde sich in
der Gleichung ein negatives Vorzeichen ergeben. Ein positives Vorzeichen ergäbe
sich hingegen wiederum, wenn man sowohl die Orientierung des Spannungspfeils als
auch die Flächenorientierung herumdrehen würde.
Beispiel: Induktion durch Bewegung des Leiters
 an. Aus Sicht eines im Laborsystem ruhenden Beobachters ergibt sich im bewegten
Leiterstab eine von null verschiedene elektrische Feldstärke. Das Feldlinienbild
zeigt ein reines Quellenfeld, d.h. ein elektrostatisches Feld. Die beiden
Schienen laden sich wie ein Kondensator gegeneinander auf. Die Wirbelstärke des
E-Feldes ist überall gleich null.
an. Aus Sicht eines im Laborsystem ruhenden Beobachters ergibt sich im bewegten
Leiterstab eine von null verschiedene elektrische Feldstärke. Das Feldlinienbild
zeigt ein reines Quellenfeld, d.h. ein elektrostatisches Feld. Die beiden
Schienen laden sich wie ein Kondensator gegeneinander auf. Die Wirbelstärke des
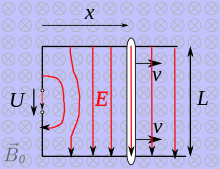
E-Feldes ist überall gleich null.Der im nebenstehenden Bild skizzierte Messaufbau besteht aus einer ruhenden
elektrisch leitfähigen Schienenanordnung, über die mit der Geschwindigkeit  ein Leiterstab gleitet. Die Anordnung befindet sich in einem örtlich und
zeitlich konstanten magnetischen Feld mit der Flussdichte
ein Leiterstab gleitet. Die Anordnung befindet sich in einem örtlich und
zeitlich konstanten magnetischen Feld mit der Flussdichte  ,
das durch einen ruhenden Permanentmagneten
oder eine ruhende mit Gleichstrom
betriebene Spulenanordnung hervorgerufen wird. Die Spannung zwischen den beiden
Schienen wird mit einem Voltmeter
gemessen.
,
das durch einen ruhenden Permanentmagneten
oder eine ruhende mit Gleichstrom
betriebene Spulenanordnung hervorgerufen wird. Die Spannung zwischen den beiden
Schienen wird mit einem Voltmeter
gemessen.
Die Spannung
hängt von der Stärke der magnetischen Flussdichte  ,
der Geschwindigkeit
und dem Schienenabstand
,
der Geschwindigkeit
und dem Schienenabstand  ab:
ab:

Diese Spannung kann mithilfe des zuvor formulierten Induktionsgesetzes für eine Leiterschleife verstanden werden. Da die magnetischen Feldlinien die aufgespannte Fläche senkrecht durchstoßen, kann der magnetische Fluss berechnet werden als

wobei die Fläche eine rechteckige Fläche mit dem Flächeninhalt

ist.
Der von den Leitern eingeschlossene magnetische Fluss beträgt folglich:

Da die Geschwindigkeit definiert ist als

kann man auch schreiben:

Man spricht in diesem Fall von der sogenannten Bewegungsinduktion, da die Spannung einzig durch die Bewegung des Leiters entstanden ist und die zeitliche Änderung der Flussdichte keine Rolle spielte.
Bei Bewegungsinduktion lässt sich die Entstehung der Spannung immer als Folge der Lorentzkraft auf die im Leiterstab vorhandenen Leitungselektronen verstehen. Im vorliegenden Beispiel erklärt sich die Entstehung der Spannung wie folgt:
- Die Lorentzkraft übt auf die Elektronen eine Kraft
 aus, wobei
aus, wobei  die Ladung eines Elektrons und
die Ladung eines Elektrons und  die Geschwindigkeit des Elektrons ist.
die Geschwindigkeit des Elektrons ist. - Die Richtung der Kraft lässt sich mit der UVW-Regel oder der
Rechte-Hand-Regel nachvollziehen. In der Zeichnung wird der Leiter von links
nach rechts bewegt (
 Daumen der rechten Hand zeigt nach rechts). Das schwachgraue Muster im
Hintergrund des Bildes symbolisiert Feldlinien des Magnetfeldes ,
die senkrecht zur Ebene der Schienenanordnung vom Betrachter weg verlaufen
(
Zeigefinger zeigt in die Zeichenebene hinein). Der Ringfinger zeigt
dementsprechend in Richtung der Kraftrichtung, die auf positive Ladungsträger
ausgeübt würde (
Ringfinger zeigt von der unteren Schiene auf die obere Schiene). Folglich
werden negativ geladene Elektronen zur unteren Schiene hin verschoben.
Daumen der rechten Hand zeigt nach rechts). Das schwachgraue Muster im
Hintergrund des Bildes symbolisiert Feldlinien des Magnetfeldes ,
die senkrecht zur Ebene der Schienenanordnung vom Betrachter weg verlaufen
(
Zeigefinger zeigt in die Zeichenebene hinein). Der Ringfinger zeigt
dementsprechend in Richtung der Kraftrichtung, die auf positive Ladungsträger
ausgeübt würde (
Ringfinger zeigt von der unteren Schiene auf die obere Schiene). Folglich
werden negativ geladene Elektronen zur unteren Schiene hin verschoben. - Aufgrund der Lorentzkraft verschieben sich die Elektronen so, dass auf der oberen Schiene ein Elektronenmangel und auf der unteren Schiene ein Elektronenüberschuss entsteht.
- Aus der ungleichmäßigen Ladungsverteilung ergibt sich ein elektrisches Feld, das der Lorentzkraft entgegenwirkt.
- Im Gleichgewichtsfall sind die Lorentzkraft
 und die Coulombkraft
und die Coulombkraft  entgegengesetzt gleich, und es gilt:
entgegengesetzt gleich, und es gilt:

Die elektrische Feldstärke zeigt in Richtung auf die untere Schiene und erklärt die auftretende Klemmenspannung.
Beispiel: Induktion durch Flussdichteänderung
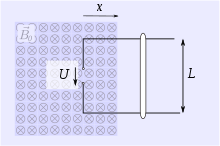
Eine Änderung des magnetischen Flusses lässt sich auch dadurch erreichen, dass man die magnetische Flussdichte ändert. Dies geschieht im nebenstehenden Beispiel dadurch, dass man einen Magneten von links kommend unter der Leiterschleife hindurchschiebt. Die Darstellung wurde so gewählt, dass sich die gleiche Flussänderung wie beim Beispiel „Induktion durch Bewegung des Leiters“ ergibt. Folglich ergibt sich an den Klemmen der Anordnung auch die gleiche Spannung:

Obwohl bei beiden Experimenten die gleiche Flussänderung und die gleiche Spannung auftreten, unterscheiden sich beide Experimente ansonsten sehr stark. Dies gilt insbesondere im Hinblick auf das elektrische Feld: Beim Beispiel „Induktion durch Bewegung des Leiters“ liegt ein elektrostatisches Feld vor, während beim Beispiel „Induktion durch Flussdichteänderung“ ein elektrisches Feld mit starken Wirbelanteilen vorliegt.
Technische Anwendungen

In der Technik findet das Induktionsgesetz in vielfacher Hinsicht Anwendung. Allen Beispielen ist gemein, dass durch Änderung des magnetischen Flusses eine stromtreibende Wirkung erzielt wird. Dies geschieht entweder durch Bewegung eines Leiters in einem magnetischen Feld (Bewegungsinduktion) oder durch Änderungen des Magnetfeldes:
- Induktionsschleife für Kfz zur Steuerung von Verkehrsampelanlagen und Schranken
- Dynamisches Mikrofon
- Dynamisches (Magnet-)Tonabnehmersystem für Plattenspieler
- Tonabnehmer für elektrische Saiteninstrumente (z.B. E-Gitarre und E-Bass)
- Tonkopf zur Abtastung von Magnetbändern
- Generator = Dynamo = Lichtmaschine
- RFID-Tag (beispielsweise Ski-Pass)
- Transkranielle Magnetstimulation
- Induktions-Linearbeschleuniger
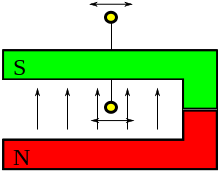
Erkennen der Flussänderung
Wenn an den Klemmen einer starren Leiterschleife eine Spannung abgreifbar ist, so kann diese dem Induktionsgesetz für Leiterschleifen entsprechend immer auf eine Flussänderung in der Leiterschleife zurückgeführt werden.
-
 Bei der Bewegung der Leiterschleife tritt eine Flussänderung auf.
Bei der Bewegung der Leiterschleife tritt eine Flussänderung auf. -
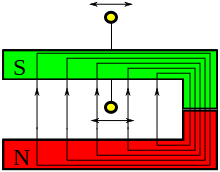
 Bei der Bewegung der Leiterschleife tritt ebenfalls eine Flussänderung auf, die aber oft nicht erkannt wird.
Bei der Bewegung der Leiterschleife tritt ebenfalls eine Flussänderung auf, die aber oft nicht erkannt wird. -
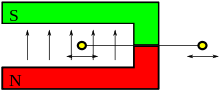
 Die magnetische Flussdichte in den Schenkeln des Hufeisenmagneten ist nicht konstant.
Die magnetische Flussdichte in den Schenkeln des Hufeisenmagneten ist nicht konstant.
Hübel weist unter dem Stichwort „Hufeisenparadoxon“ darauf hin, dass diese Flussänderung in manchen Fällen dem ungeübten Auge verborgen bleibt und diskutiert die Probleme anhand verschiedener Anordnungen mit Hufeisenmagneten, wie sie typischerweise im Schulunterricht verwendet werden (vgl. nebenstehende Bilder).
Während die Flussänderung in der Leiterschleife in der ersten Anordnung für Anfänger normalerweise leicht erkennbar ist, misslingt dies vielen Lernenden bei dem zweiten Bild. Die Lernenden konzentrieren sich auf den mit Luft erfüllten Bereich der Anordnung und berücksichtigen nicht, dass die Flussdichte zum Pol des Permanentmagneten hin nur im Innenbereich kontinuierlich zunimmt, während sie maßgeblich zu den Polen hin im Magneten abnimmt (siehe drittes Bild).
Anordnung mit Rollkontakten – Versuch von Hering
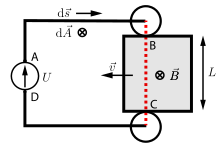
Das nebenstehend dargestellte Experiment zum Heringschen Paradoxon, benannt nach Carl Herin, zeigt, dass am Spannungsmessgerät kein Ausschlag stattfindet, obwohl bei einer bestimmtem Betrachtung eine Flussänderung vorliegt.
Anordnung: Ein elektrisch ideal leitfähiger Permanentmagnet wird mit der
Geschwindigkeit
in eine Leiterschleife hineinbewegt. Die obere und untere Kontaktfläche des
Magneten sind über feststehende Rollen elektrisch leitend mit den
eingezeichneten Leiterdrähten verbunden.
Paradoxon: Der scheinbare Widerspruch des Experimentes zum Induktionsgesetz ist durch eine formale Betrachtung auflösbar. Dabei führen Form I und Form II mit ruhender oder auch konvektiver (im Magneten mitwandernder) Umlaufkurve zum (gemessenen) Ergebnis, dass keine Spannung induziert wird. Die Tabelle gibt exemplarisch die Terme an, die bei Form II anfallen.
| Induktionsgesetz Form II | 
|

|

|

|

|

|

|
ruhend | 0 | 
|

|
0 |
|

|
konvektiv | 
|
|
|

|
0 |
Gegenüber dem hohen Innenwiderstand des Spannungsmessers sind die auf die
ruhende Messleitung und den bewegten Magneten entfallenden Widerstände
vernachlässigbar. Deshalb kann im ruhenden Teil CDAB nur im Spannungsmesser eine
elektrische Feldstärke existieren, sodass dort der Beitrag zum Umlaufintegral
von  gleich
ist (4. Spalte der Tabelle). Der Term
gleich
ist (4. Spalte der Tabelle). Der Term  in der 5. Spalte rührt daher, dass der bewegte magnetisierte Körper im
Laborsystem elektrisch polarisiert erscheint.
Der Term gibt die entsprechende elektrische Spannung an. Zum gleichen Resultat
führt auch die Transformationsbeziehung
zwischen elektrischer Feldstärke und magnetischer Flussdichte
in der 5. Spalte rührt daher, dass der bewegte magnetisierte Körper im
Laborsystem elektrisch polarisiert erscheint.
Der Term gibt die entsprechende elektrische Spannung an. Zum gleichen Resultat
führt auch die Transformationsbeziehung
zwischen elektrischer Feldstärke und magnetischer Flussdichte  >
nach Lorentz bei
>
nach Lorentz bei  .
In den magnetischen Schwund in der Spalte rechts außen geht die Bewegung der
Randlinie ein. Bei bewegtem Abschnitt BC bleibt der Fluss konstant. Ruhende oder
bewegte Randlinie führen mit den angegebenen Termen zum (auch gemessenen)
Resultat
.
In den magnetischen Schwund in der Spalte rechts außen geht die Bewegung der
Randlinie ein. Bei bewegtem Abschnitt BC bleibt der Fluss konstant. Ruhende oder
bewegte Randlinie führen mit den angegebenen Termen zum (auch gemessenen)
Resultat  .
.
Allgemeines Induktionsgesetz in differentieller Form und in Integralform
Das Gesetz der elektromagnetischen Induktion, kurz Induktionsgesetz, beschreibt den Zusammenhang zwischen elektrischen und magnetischen Feldern. Es besagt, dass bei einer Änderung des magnetischen Flusses durch eine Fläche am Rand dieser Fläche eine Ringspannung entsteht. In besonders häufig verwendeten Formulierungen wird das Induktionsgesetz beschrieben, indem die Randlinie der Fläche als unterbrochene Leiterschleife dargestellt wird, an deren offenen Enden die Spannung gemessen werden kann.
Die zum Verständnis sinnvolle Beschreibung gliedert sich in zwei mögliche Darstellungsformen:
- Die Integralform oder auch globale Form des Induktionsgesetzes: Dabei werden die globalen Eigenschaften eines räumlich ausgedehnten Feldgebietes (über den Integrationsweg) beschrieben.
- Die differentielle Form oder auch lokale Form des Induktionsgesetzes: Dabei werden die Eigenschaften einzelner lokaler Feldpunkte in Form von Dichten beschrieben. Die Volumina der globalen Form streben gegen null, und die auftretenden Feldstärken werden differenziert.
Beide Darstellungsformen beschreiben denselben Sachverhalt. Je nach konkretem Anwendungsfall und Problemstellung kann es sinnvoll sein, die eine oder die andere Form zu benutzen.
Bei der Anwendung des Induktionsgesetzes ist zu beachten, dass alle in den
Gleichungen auftretenden Größen, d.h. die elektrische
Feldstärke ,
die magnetische Flussdichte ,
die orientierte Fläche ,
die Konturlinie
dieser Fläche und die lokale Geschwindigkeit
eines Punktes auf der Konturlinie von einem beliebigen, aber für alle Größen
gleichen, Bezugssystem (Inertialsystem)
aus beschrieben werden.
Führt die Konturlinie durch Materie, ist zudem zu beachten:
- Die Konturlinie
ist eine gedachte Linie. Da sie keine physikalische Entsprechung hat, hat eine
eventuelle zeitliche Bewegung der Konturlinie grundsätzlich keinen Einfluss
auf die stattfindenden physikalischen Prozesse. Insbesondere verändert eine
Bewegung der Konturlinie nicht die Feldgrößen
und .
In der Integralform I wird die Bewegung der Konturlinie daher überhaupt
nicht berücksichtigt. In der Integralform II beeinflusst die Bewegung der
gedachten Konturlinie beide Seiten der Gleichung in gleichem Maße, sodass man
bei der Berechnung beispielsweise einer elektrischen Spannung mit
Integralform I zu dem gleichen Ergebnis kommt wie bei der Berechnung
derselben Spannung mithilfe von Integralform II.
- Grundsätzlich darf die Geschwindigkeit der Konturlinie von der
Geschwindigkeit der im Experiment verwendeten Körper (z.B.
Leiterschleife, Magnete) abweichen. Die Geschwindigkeit der Konturlinie in
Bezug auf den Beobachter wird im Rahmen des Artikels mit
gekennzeichnet, während die Geschwindigkeit von Objekten mit dem Buchstaben
beschrieben wird.
- Im Gegensatz zur Bewegung der Konturlinie hat die Geschwindigkeit der
Körper im Allgemeinen einen Einfluss auf die stattfindenden physikalischen
Vorgänge. Das gilt insbesondere für die Feldgrößen
und ,
die der jeweilige Beobachter misst.
Induktionsgesetz in differentieller Form
Das Induktionsgesetz in differentieller Form lautet:

Das Vorhandensein von elektrischen Wirbeln bzw. einer zeitveränderlichen
magnetischen Flussdichte ist das wesentliche Kennzeichen von Induktion. In
elektrischen Feldern ohne Induktion (z.B. in dem Feld unbewegter Ladungen)
existieren keine geschlossenen Feldlinien der elektrischen Feldstärke  ,
und das Umlaufintegral der elektrischen Feldstärke ergibt immer null.
,
und das Umlaufintegral der elektrischen Feldstärke ergibt immer null.
Seine Hauptanwendung findet das Induktionsgesetz in differentieller Form einerseits bei theoretischen Herleitungen und in der numerischen Feldberechnung, andererseits (jedoch seltener) in der analytischen Berechnung konkreter technischer Fragestellungen.
Wie in Einsteins erstem Werk über die spezielle Relativitätstheorie gezeigt wurde, stehen die Maxwellgleichungen in differentieller Form in Übereinstimmung mit der speziellen Relativitätstheorie. Eine an den heutigen Sprachgebrauch angepasste Herleitung hierzu findet sich in dem inzwischen vergriffenen Lehrbuch von Simonyi.
Übergang von der differentiellen Form zur Integralform
Der Zusammenhang zwischen der Integralform und der differentiellen Form kann mithilfe des Satzes von Stokes mathematisch beschrieben werden. Dabei werden die globalen Wirbel- und Quellenstärken in lokale, diskrete Wirbel- bzw. Quellendichten, die einzelnen Raumpunkten (Punkten eines Vektorfeldes) zugeordnet sind, übergeführt.
Ausgangspunkt ist das Induktionsgesetz in differentieller Form:
Zur Überführung in die integrale Form wird der Satz von Stokes verwendet, der
aus naheliegenden Gründen mit der Variablen
formuliert wird:

Ersetzt man im rechten Term des Stokesschen Gesetzes das Vektorfeld
entsprechend dem Induktionsgesetz in differentieller Form durch den Term  ,
so ergibt sich:
,
so ergibt sich:

Das ist eine mögliche allgemeine Form des Induktionsgesetzes in Integralform, die entgegen vielen anderslautenden Behauptungen sowohl für Konturlinien in ruhenden Körpern als auch in bewegten Körpern angewendet werden kann.[3]
Um eine Formulierung zu erhalten, die den magnetischen Fluss  enthält, addiert man auf beiden Seiten der Gleichung den Term
enthält, addiert man auf beiden Seiten der Gleichung den Term  .
Dabei ergibt sich:
.
Dabei ergibt sich:

Der rechte Teil der Gleichung entspricht wegen  der negativen zeitlichen Änderung des magnetischen Flusses,[4]
sodass das Induktionsgesetz in Integralform in voller Allgemeingültigkeit auch
folgendermaßen notiert werden kann:
der negativen zeitlichen Änderung des magnetischen Flusses,[4]
sodass das Induktionsgesetz in Integralform in voller Allgemeingültigkeit auch
folgendermaßen notiert werden kann:

In vielen Lehrbüchern werden diese Zusammenhänge leider nicht richtig
notiert, was daran erkennbar ist, dass der auf der linken Gleichungsseite
notierte Term  fehlt.
fehlt.
Der Irrtum besteht wahrscheinlich darin, dass der fehlende Term irrtümlich
der elektrischen Feldstärke zugeschlagen wird. (Manche Autoren sprechen in
diesem Zusammenhang auch von einer effektiven elektrischen
Feldstärke.)[5]
In seiner Konsequenz führt das Weglassen des Terms
dazu, dass die Größe
inkonsistent verwendet wird und je nach Zusammenhang eine unterschiedliche
Bedeutung hat.[6]
Induktionsgesetz in Integralform
 aus der elektrischen Feldstärke
und dem Wegstückchen
aus der elektrischen Feldstärke
und dem Wegstückchen 
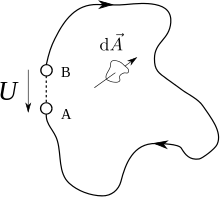
Im folgenden Abschnitt wird die erste Integralform des Induktionsgesetzes betrachtet:

Entsprechend der mathematischen Formulierung des Integrals wird die Fläche
zu einem konstanten Zeitpunkt betrachtet und deren zeitliche Änderung nicht
berücksichtigt.
Im Hinblick auf den Begriff der induzierten Spannung – das Integral über die elektrische Feldstärke – wird zunächst die im nebenstehenden Bild eingezeichnete Verbindungslinie zwischen den Punkten A und B in einem elektrischen Feld betrachtet.
Die Spannung zwischen den Punkten A und B („äußerer Pole“ einer „Steckdose“)
kann man näherungsweise berechnen, indem man den Weg in viele kleine Wegelemente
 unterteilt. Da man aufgrund der nur geringen Länge näherungsweise von einer
konstanten elektrischen Feldstärke entlang eines solchen Wegstückes ausgehen
kann, ergibt sich für die Teilspannung entlang eines Wegelementes im Innern der
Wert
unterteilt. Da man aufgrund der nur geringen Länge näherungsweise von einer
konstanten elektrischen Feldstärke entlang eines solchen Wegstückes ausgehen
kann, ergibt sich für die Teilspannung entlang eines Wegelementes im Innern der
Wert

Als Gesamtspannung zwischen beiden Punkten ergibt sich somit

Die exakte Darstellung wird mithilfe eines Integrals definiert. Dieses kann
man sich als Grenzwert für unendlich viele Wegstücke mit unendlich kleiner Länge
 vorstellen. Zur Berechnung definiert man i.A. eine von einem Parameter
vorstellen. Zur Berechnung definiert man i.A. eine von einem Parameter
 abhängige Funktion
abhängige Funktion  ,
die im Bereich
,
die im Bereich  die Punkte entlang der Wegstrecke beschreibt (im Innern also
in Pfeilrichtung). Die Spannung zwischen beiden Punkten kann dann
über ein Kurvenintegral formal erfasst werden:
die Punkte entlang der Wegstrecke beschreibt (im Innern also
in Pfeilrichtung). Die Spannung zwischen beiden Punkten kann dann
über ein Kurvenintegral formal erfasst werden:
 berechnet in Pfeilrichtung
berechnet in Pfeilrichtung
Lässt man nun den Punkt entlang der Kontur  eines Gesamtumlaufes weiterwandern, bis er die eingeschlossene Fläche genau
einmal umrundet hat und wieder mit Ausgangspunkt identisch wird
eines Gesamtumlaufes weiterwandern, bis er die eingeschlossene Fläche genau
einmal umrundet hat und wieder mit Ausgangspunkt identisch wird  ergibt sich als Gesamtwert die in der geschlossenen Leiterschleife induzierte
Umlaufspannung
ergibt sich als Gesamtwert die in der geschlossenen Leiterschleife induzierte
Umlaufspannung  :
:

Hinsichtlich des Vorzeichens ist zu berücksichtigen, dass die Kontur die Fläche dabei im Sinne der Rechte-Hand-Regel umrundet.
Der dritte Ausdruck obiger Gleichungen ist dabei die dem zweiten Ausdruck
gleichwertige vektorielle Darstellung des tangentialen Feldstärkeanteils
mithilfe des Skalarproduktes,
und die beiden Integrale sind sogenannte Ringintegrale, die immer
dann verwendet werden, wenn (wie hier) längs eines geschlossenen Weges
integriert wird, in diesem Fall entlang der Kontur der Leiterschleife 
Die induzierte Spannung lässt sich bei einer nichtbewegten Leiterschleife näherungsweise als Spannungsabfall mit einem Spannungsmessgerät messen, wenn man entlang der geschlossenen Linie eine Leiterschleife anbringt und diese an einer Stelle auftrennt. Da über dem Leiterdraht nahezu keine elektrische Spannung abfällt, liegt die ganze induzierte Spannung zwischen den Klemmen.
Relativistische Aspekte
In Messsystemen mit bewegten Komponenten treten auch schon bei kleinen
Geschwindigkeiten  relativistische Effekte auf. Diese grundsätzliche Tatsache wird durch ein
einfaches Gedankenexperiment deutlich:
relativistische Effekte auf. Diese grundsätzliche Tatsache wird durch ein
einfaches Gedankenexperiment deutlich:
- Ein Beobachter, der eine (relativ zu ihm nicht bewegte) Ladung beobachtet, wird ein elektrisches Feld messen, jedoch aufgrund des fehlenden Stromflusses kein magnetisches Feld.
- Bewegt sich der Beobachter hingegen auf die Ladung zu oder von ihr weg, so
wird er einerseits bemerken, dass sich aufgrund der Bewegung das elektrische
Feld verändert. Das bedeutet, dass der Beobachter bei gleicher Entfernung von
der Ladung, aber anderer Relativgeschwindigkeit zur Ladung ein
unterschiedliches -Feld
misst. Andererseits interpretiert der Beobachter die Ladung aber auch als
einen Strom, der sich von ihm fort oder auf ihn zubewegt. Der Beobachter wird
also zusätzlich zum elektrischen Feld ein magnetisches Feld erkennen.
Damit bei Messungen mit bewegten Komponenten keine Missverständnisse auftreten, ist die Angabe des Bezugssystems, relativ zu dem die Beobachtungen beschrieben werden, unbedingt erforderlich. Ebenso ist es erforderlich, Größen, die in einem anderen als dem zugrunde gelegten Bezugssystem gemessen werden, mithilfe der Lorentztransformation umzurechnen.
Besonders wichtig ist die Anwendung der Lorentztransformation bei der Betrachtung elektrischer Feldstärken. Dies ist entgegen einer weit verbreiteten Ansicht schon bei Geschwindigkeiten weit unterhalb der Lichtgeschwindigkeit (beispielsweise einige mm/s) erforderlich und in praktisch allen Experimenten mit bewegten Leitern von Bedeutung.
-FeldZur Erläuterung betrachten wir erneut den bewegten Leiterstab im zeitlich
konstanten -Feld.
Da die Leiterschleife geöffnet ist, beträgt die stromtreibende Kraft  auf eine Ladung
auf eine Ladung 

In dem mit der Geschwindigkeit
bewegten Leiterstab ergibt sich somit aus Sicht eines Beobachters im Laborsystem
die Feldstärke

während im Bereich des ruhenden Leiters mit  eine Feldstärke von
eine Feldstärke von

herrscht.
Die Unterschiede in der Feldstärke zwischen den bewegten und den ruhenden Leiterabschnitten ergeben sich direkt aus der Lorentztransformation für die elektrische Feldstärke: Ein Beobachter, der sich mit dem bewegten Leiterstab mitbewegt, wird innerhalb des Leiterstabes eine (Eigen-)Feldstärke von

messen. Setzt man die (gestrichene) Eigenfeldstärke in die passende Transformationsgleichung ein, so ergibt sich für die entsprechende Größe im Laborsystem:

Wegen  entfällt der gesamte rechte Term und damit auch die Relevanz des Faktors
entfällt der gesamte rechte Term und damit auch die Relevanz des Faktors  ,
der gewissermaßen „in die Null hineindividiert“ werden kann. Wie erwartet ergibt
sich dabei für die elektrische Feldstärke aus Sicht des Laborsystems der Wert
,
der gewissermaßen „in die Null hineindividiert“ werden kann. Wie erwartet ergibt
sich dabei für die elektrische Feldstärke aus Sicht des Laborsystems der Wert

Mithilfe dieses Experimentes kann man demzufolge Relativitätstheorie mit
einfachen Vorlesungsexperimenten demonstrieren. Da das genannte Experiment in
vielen Darstellungen als ein Beispiel für elektromagnetische Induktion
dargestellt wird, soll ausdrücklich bekräftigt werden, dass die Klemmenspannung
nicht auf Wirbel des elektrischen Feldes zurückgeführt werden kann, da wegen
 keine solchen vorhanden sind. Wie das Feldlinienbild zeigt, liegt ein reines
Potentialfeld vor. Diese zeigen von positiven Ladungen auf der Oberfläche der
oberen Schiene zu negativen Ladungen auf der Oberfläche der unteren Schienen. In
diesem Sinne kann der physikalische Vorgang, der bei diesem Experiment
stattfindet, mit dem Aufladen eines Kondensators verglichen werden.
keine solchen vorhanden sind. Wie das Feldlinienbild zeigt, liegt ein reines
Potentialfeld vor. Diese zeigen von positiven Ladungen auf der Oberfläche der
oberen Schiene zu negativen Ladungen auf der Oberfläche der unteren Schienen. In
diesem Sinne kann der physikalische Vorgang, der bei diesem Experiment
stattfindet, mit dem Aufladen eines Kondensators verglichen werden.
Betrachtungen spezieller Fragestellungen
Induktionsbeispiel: Bewegter Leiterstab im Magnetfeld (mit Stromfluss)
In Abänderung des weiter oben diskutierten Beispiels eines „bewegten Leiterstabes im homogenen Magnetfeld“ wird hier ein Stromkreis mit endlichem Widerstand betrachtet, sodass es bei der Bewegung des Leiterstabes im Magnetfeld zu einem Stromfluss kommt. Für die Stromstärke gilt:

Hierbei wird die gesamte Flussänderung in der Leiterschleife betrachtet. Da
aber die Induktivität
 für eine Leiteranordnung wie hier genähert werden kann, ist auch der
stromabhängige magnetische Fluss
für eine Leiteranordnung wie hier genähert werden kann, ist auch der
stromabhängige magnetische Fluss  und die dazugehörige Flussänderung
und die dazugehörige Flussänderung  vernachlässigbar. Die induzierte Stromstärke ist damit:
vernachlässigbar. Die induzierte Stromstärke ist damit:

Wird der Leiterstab mit der konstanten Geschwindigkeit
bewegt, wird mechanische Arbeit verrichtet. Die Kraft ist die Lorentzkraft auf einen
stromdurchflossenen Leiter der Länge
im Magnetfeld der Flussdichte  :
:
 hier:
hier: 
Für die elektrische
Leistung, die im Widerstand umgesetzt wird, gilt  und für die mechanische
Leistung einer solchen gleichförmigen Bewegung gilt
und für die mechanische
Leistung einer solchen gleichförmigen Bewegung gilt  ,
nachdem man die entsprechenden Größen von oben eingesetzt hat. Es wird also
mechanische Arbeit in elektrische umgewandelt.
,
nachdem man die entsprechenden Größen von oben eingesetzt hat. Es wird also
mechanische Arbeit in elektrische umgewandelt.
Induktionsbeispiel: Leiterschleife im Magnetfeld
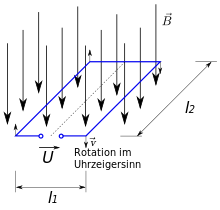
Dreht sich eine Leiterschleife mit der Winkelgeschwindigkeit
 in einem aus dem Laborsystem betrachtet zeitlich konstanten Magnetfeld, so
verändert sich aus Sicht der Leiterschleife die magnetische Flussdichte ständig,
und es ergibt sich ein veränderter magnetischer Fluss durch die Leiterschleife.
in einem aus dem Laborsystem betrachtet zeitlich konstanten Magnetfeld, so
verändert sich aus Sicht der Leiterschleife die magnetische Flussdichte ständig,
und es ergibt sich ein veränderter magnetischer Fluss durch die Leiterschleife.
Die an den Klemmen im sich drehenden System gemessene Spannung kann folgendermaßen berechnet werden:
- Die durch die Leiterschleife berandete ebene Fläche hat den Flächeninhalt
 .
. - Die magnetische Flussdichte ändert im Koordinatensystem des mitbewegten
Beobachters ständig ihren Betrag und ihre Richtung. Nimmt man an, dass das
Bild die Fläche zum Zeitpunkt
 zeigt, so beträgt der senkrecht auf die Fläche auftretende Anteil der
Flussdichte
zeigt, so beträgt der senkrecht auf die Fläche auftretende Anteil der
Flussdichte  .
. - Der durch die Fläche
 hindurchstoßende magnetische Fluss beträgt dementsprechend
hindurchstoßende magnetische Fluss beträgt dementsprechend  .
. - Für die Spannung
folgt somit mit Hilfe der Kettenregel:

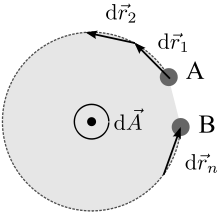
Induktionsbeispiel: Induktion bei einer elektrischen Spule mit mehreren Windungen
Das Induktionsgesetz ist auch für elektrische Spulen mit mehreren Windungen
anwendbar. Die zur Berechnung des magnetischen Flusses erforderliche Fläche wird
im nebenstehenden Bild veranschaulicht.
Das Induktionsgesetz in seiner allgemeinen Form erfordert daher keinen Faktor
 für die Windungszahl der Spule, auch wenn der Spulendraht im konkreten Fall
einen Zylinder mehrfach umläuft.
für die Windungszahl der Spule, auch wenn der Spulendraht im konkreten Fall
einen Zylinder mehrfach umläuft.
In den meisten Veröffentlichungen zur elektromagnetischen Induktion bei
elektrischen Spulen wird der Einfachheit halber der Faktor
für die Windungszahl eingeführt, und das Induktionsgesetz wird in der Form

angegeben. Hierbei bezeichnet  den Fluss durch eine von dem Spulendraht und den Anschlüssen berandete Fläche,
den Fluss durch eine von dem Spulendraht und den Anschlüssen berandete Fläche,
 den von einer einzelnen Windung umschlossenen magnetischen Fluss, und
ist die gemessene Spannung.
den von einer einzelnen Windung umschlossenen magnetischen Fluss, und
ist die gemessene Spannung.
Formulierungsvariante: ohmsches Gesetz für bewegte Leiter
Die Zusammenhänge bei Bewegungsinduktion lassen sich relativ leicht auch über das ohmsche Gesetz für bewegte Leiter erfassen. Im Unterschied zu einem ruhenden Leiter, bei dem ausschließlich die elektrische Feldstärke stromtreibend wirkt, wirkt auf die Ladungen in einem bewegten Leiter die komplette Lorentzkraft

Für nichtrelativistische Geschwindigkeiten
ist die im ruhenden Bezugssystem gemessene Lorentzkraft gleich groß wie die
Kraft, die die Ladung im mitbewegten System erfährt.
Für bewegte Materialien, für die das ohmsche
Gesetz gilt, kann die spezifische Leitfähigkeit  durch die Gleichung
durch die Gleichung

mit der elektrischen Feldstärke ,
der Geschwindigkeit
des jeweiligen Leiterelements und der magnetischen Flussdichte
definiert werden. Das ohmsche Gesetz lautet dann wie im Falle unbewegter
Materialien

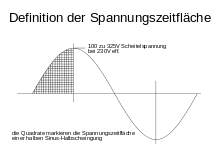
Formulierungsvariante: Zeitlich integrierte Form, Spannungszeitfläche
Durch Integration über die Zeit lässt sich das Induktionsgesetz für Leiterschleifen folgendermaßen umformen:

Diese Beziehung beschreibt den Flussverlauf als Integralfunktion des Spannungsverlaufs.
Betrachtet man den Vorgang in einem Zeitintervall von  bis
bis  bei konstanter Fläche, durch die der magnetische Fluss tritt – das
Zeitintervall kann sich beispielsweise über eine Halbperiode einer
Wechselspannung erstrecken –, so folgt daraus für den sich dann ergebenden
Fluss
bei konstanter Fläche, durch die der magnetische Fluss tritt – das
Zeitintervall kann sich beispielsweise über eine Halbperiode einer
Wechselspannung erstrecken –, so folgt daraus für den sich dann ergebenden
Fluss

Für den Fall  bedeutet das, dass der magnetische Fluss durch eine Leiterschleife bzw. eine
Flussänderung in dieser, wie sie sich durch Anlegen einer Spannung nach der
gegebenen Zeit
dort einstellt, immer von dem Spannungszeitintegral in den angegebenen Grenzen
bis
verursacht sein und diesem auch entsprechen muss. Die dafür relevante Spannung
ist jeweils die induzierte Spannung
bedeutet das, dass der magnetische Fluss durch eine Leiterschleife bzw. eine
Flussänderung in dieser, wie sie sich durch Anlegen einer Spannung nach der
gegebenen Zeit
dort einstellt, immer von dem Spannungszeitintegral in den angegebenen Grenzen
bis
verursacht sein und diesem auch entsprechen muss. Die dafür relevante Spannung
ist jeweils die induzierte Spannung  .
Diese entspricht der angelegten Spannung abzüglich ohmscher Spannungsabfälle
.
Diese entspricht der angelegten Spannung abzüglich ohmscher Spannungsabfälle
 soweit diese nicht zu vernachlässigen sind.
soweit diese nicht zu vernachlässigen sind.
Zu veranschaulichen ist das Spannungszeitintegral auch als Fläche zwischen
dem Spannungsgraphen und der Zeitachse über dem Intervall ![{\displaystyle [0;T],}](/svg/a4364c5a1f7d3497a4da2448993728255c2f0da5.svg) weshalb man es bisweilen auch als Spannungszeitfläche oder
Spannungszeitsumme
bezeichnet, in meist älterer Literatur in Anlehnung an den Begriff des Kraftstoßes
auch als Spannungsstoß.
Ursächlich hierfür ist der Umstand, dass messtechnisch früher die Integration
von induzierten Spannungsimpulsen mittels ballistischer Galvanometer durchgeführt
wurde, vgl. auch Veranschaulichung
des magnetischen Kraftflusses.
weshalb man es bisweilen auch als Spannungszeitfläche oder
Spannungszeitsumme
bezeichnet, in meist älterer Literatur in Anlehnung an den Begriff des Kraftstoßes
auch als Spannungsstoß.
Ursächlich hierfür ist der Umstand, dass messtechnisch früher die Integration
von induzierten Spannungsimpulsen mittels ballistischer Galvanometer durchgeführt
wurde, vgl. auch Veranschaulichung
des magnetischen Kraftflusses.
Beispiel für 50 Hz bei  :
Auf grafische Weise durch Auszählen der kleinen Quadrate ermittelt, erhält man
das Ergebnis von ca. 1,05 Voltsekunden zum Bild rechts oben, für eine
Sinushalbschwingung folglich 2,1 Voltsekunden. Das ist die
Spannungszeitfläche, welche die Induktion im Eisenkern eines Transformators von
einem Ende der Hysteresekurve zum anderen Ende transportiert. Wenn ein
Transformator passend zu den 230 V bei 50 Hz ausgelegt ist, läuft die
Induktion im Dauerbetrieb hauptsächlich im senkrechten Bereich der
Hysteresekurve. Höhere Spannung oder niedrigere Frequenz führt zum Übersteuern
der Hysteresekurve in die waagerecht verlaufenden Bereiche, zur Kernsättigung,
was dann auch in der Praxis durch den Anstieg des Magnetisierungsstromes
anschaulich beobachtbar ist.
:
Auf grafische Weise durch Auszählen der kleinen Quadrate ermittelt, erhält man
das Ergebnis von ca. 1,05 Voltsekunden zum Bild rechts oben, für eine
Sinushalbschwingung folglich 2,1 Voltsekunden. Das ist die
Spannungszeitfläche, welche die Induktion im Eisenkern eines Transformators von
einem Ende der Hysteresekurve zum anderen Ende transportiert. Wenn ein
Transformator passend zu den 230 V bei 50 Hz ausgelegt ist, läuft die
Induktion im Dauerbetrieb hauptsächlich im senkrechten Bereich der
Hysteresekurve. Höhere Spannung oder niedrigere Frequenz führt zum Übersteuern
der Hysteresekurve in die waagerecht verlaufenden Bereiche, zur Kernsättigung,
was dann auch in der Praxis durch den Anstieg des Magnetisierungsstromes
anschaulich beobachtbar ist.
Als weiteres Beispiel kann ein vielfach praktiziertes Messprinzip für den magnetischen Fluss dienen: Hier wird der zu messende Fluss von einer Messspule erfasst und die Spannung an der Spule auf einen Integrator gegeben, der an seinem Ausgang als Ergebnis unmittelbar den Fluss anzeigt.
Formulierungsvariante: Flussregel
Die Flussregel  formuliert das Induktionsgesetz in Integralform für den Spezialfall einer
Leiterschleife: Sie gilt für geschlossene Umlaufwege, die ganz in elektrisch
leitendem (auch bewegtem) Material im (auch zeit- und ortsveränderlichen)
Magnetfeld verlaufen, vorzugsweise in Leiterschleifen mit geringem Querschnitt.
Im Fall bewegter Leiterschleifen muss sich die festgelegte Umlaufkurve zeitlich
stetig und konvektiv (s.u.) ohne Unterbrechungen entwickeln. Die
Geschwindigkeiten in der Anordnung müssen deutlich kleiner als die
Lichtgeschwindigkeit sein.
formuliert das Induktionsgesetz in Integralform für den Spezialfall einer
Leiterschleife: Sie gilt für geschlossene Umlaufwege, die ganz in elektrisch
leitendem (auch bewegtem) Material im (auch zeit- und ortsveränderlichen)
Magnetfeld verlaufen, vorzugsweise in Leiterschleifen mit geringem Querschnitt.
Im Fall bewegter Leiterschleifen muss sich die festgelegte Umlaufkurve zeitlich
stetig und konvektiv (s.u.) ohne Unterbrechungen entwickeln. Die
Geschwindigkeiten in der Anordnung müssen deutlich kleiner als die
Lichtgeschwindigkeit sein.
Herleitung: Über den Umlaufweg im Induktionsgesetz Form II kann
weitgehend frei verfügt werden. Im zur Flussregel führenden Ansatz wird allen
Elementen  des Umlaufwegs die lokale Stoffgeschwindigkeit
vorgegeben (konvektive Linienelemente,
des Umlaufwegs die lokale Stoffgeschwindigkeit
vorgegeben (konvektive Linienelemente,  ).
Damit gilt:
).
Damit gilt:
 .
.
Der Integrand des Linksterms ist nach den Transformationsgleichungen
von Lorentz gleich der elektrischen Feldstärke  im Ruhesystem jedes Linienelements, sodass auch
im Ruhesystem jedes Linienelements, sodass auch

oder kürzer
geschrieben werden kann. Die letzten beiden gleichwertigen Gleichungen sind
zunächst für die oben genannten Voraussetzungen zugeschnittene Formen des
Induktionsgesetzes. Die letzte Gleichung wird als Flussregel
bezeichnet, wenn sie auf einen unverzweigten Stromkreis angewandt wird.[7]
Die als induzierte Spannung
bezeichnete stromtreibend wirkende elektromagnetische Größe  – ihrer Definition nach eine Ringspannung – erweist sich als
wertgleich mit dem magnetischen Schwund
– ihrer Definition nach eine Ringspannung – erweist sich als
wertgleich mit dem magnetischen Schwund  .
Ein irgendwo im Leiterkreis eingebauter Spannungsmesser, dessen Innenwiderstand
groß gegen den Widerstand des restlichen Kreises ist, zeigt den Wert von
an.[8]
.
Ein irgendwo im Leiterkreis eingebauter Spannungsmesser, dessen Innenwiderstand
groß gegen den Widerstand des restlichen Kreises ist, zeigt den Wert von
an.[8]
Dass der magnetische Schwund
(in Gl. ( )
der Rechtsterm) einen elektrischen Strom durch den elektrischen Widerstand in
der Leiterschleife antreiben kann, illustriert die Form des Linksterms: Dort
steht die ladungsbezogene Arbeit, welche die Lorentzkraft
an der Ladung bei einem Schleifenumlauf verrichtet. Der Anwendungskomfort der
Flussregel liegt darin, dass die stromtreibende induzierte Spannung
in einer ruhenden oder auch bewegten Leiterschleife allein aus dem Magnetfeld
bestimmt werden kann: Die elektrische Feldstärke im Laborsystem
und jene im Ruhesystem der Linienelemente
kommt in der Formel nicht vor.
)
der Rechtsterm) einen elektrischen Strom durch den elektrischen Widerstand in
der Leiterschleife antreiben kann, illustriert die Form des Linksterms: Dort
steht die ladungsbezogene Arbeit, welche die Lorentzkraft
an der Ladung bei einem Schleifenumlauf verrichtet. Der Anwendungskomfort der
Flussregel liegt darin, dass die stromtreibende induzierte Spannung
in einer ruhenden oder auch bewegten Leiterschleife allein aus dem Magnetfeld
bestimmt werden kann: Die elektrische Feldstärke im Laborsystem
und jene im Ruhesystem der Linienelemente
kommt in der Formel nicht vor.
Die Wicklungen von Transformatoren, Elektromotoren und Generatoren zur Stromerzeugung sind Leiterschleifen im Sinne der Flussregel.
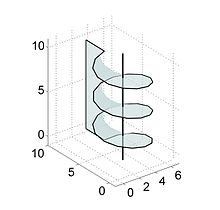
Beispiel Atmende Leiterschleife
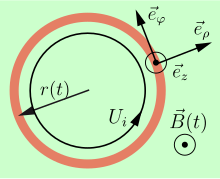
Die rechts skizzierte kreisringförmige (elastisch gedachte) Leiterschleife
mit zeitveränderlichem Radius  befindet sich in einem homogenen, zeitabhängigen Magnetfeld
befindet sich in einem homogenen, zeitabhängigen Magnetfeld  .
Der Leiterquerschnitt
und die elektrische Leitfähigkeit
können längs des Umfangs variieren. Die zeitliche Ableitung
.
Der Leiterquerschnitt
und die elektrische Leitfähigkeit
können längs des Umfangs variieren. Die zeitliche Ableitung  des Radius
des Radius  erweist sich als die lokale, radial gerichtete Geschwindigkeit
der Ringelemente. Die Schleifenebene liegt normal zur
erweist sich als die lokale, radial gerichtete Geschwindigkeit
der Ringelemente. Die Schleifenebene liegt normal zur  -Achse
und bleibt parallel zu sich selbst. In der Skizze bezeichnen die Pfeile für den
radialen, peripheren und axialen Einheitsvektor
-Achse
und bleibt parallel zu sich selbst. In der Skizze bezeichnen die Pfeile für den
radialen, peripheren und axialen Einheitsvektor  ,
,
 bzw.
bzw.  auch die Bezugsrichtungen für die in Frage kommenden skalaren Größen. Alle im
Folgenden angegebenen Feldgrößen sind zeitabhängig, was die Notation nicht jedes
Mal wiederholt.
auch die Bezugsrichtungen für die in Frage kommenden skalaren Größen. Alle im
Folgenden angegebenen Feldgrößen sind zeitabhängig, was die Notation nicht jedes
Mal wiederholt.
Die in der Schleife induzierte Spannung  treibt darin einen elektrischen Strom
treibt darin einen elektrischen Strom  an mit
an mit  .
Dessen felderzeugende Wirkung ist als vernachlässigbar oder schon in
.
Dessen felderzeugende Wirkung ist als vernachlässigbar oder schon in  enthalten vorausgesetzt.
enthalten vorausgesetzt.
Die elektrischen Feldgrößen, die aus der Flussregel eliminiert sind, werden
im Folgenden nur zur Information angegeben. Für die Stromdichte und die
elektrische Feldstärke im Ruhesystem der Ringelemente gilt  bzw.
bzw.  .
Für die elektrische Feldstärke im Ruhesystem des Schleifenzentrums erhält man
mit
.
Für die elektrische Feldstärke im Ruhesystem des Schleifenzentrums erhält man
mit  das Resultat
das Resultat  .
Die letzte Gleichung folgt mit
.
Die letzte Gleichung folgt mit  .
Für den Fall, dass der Leiterquerschnitt und die Leitfähigkeit am Umfang
konstant sind, spiegelt sich die Rotationssymmetrie der Anordnung auch in den
Feldgrößen. Man erhält dann die Feldkoordinaten
.
Für den Fall, dass der Leiterquerschnitt und die Leitfähigkeit am Umfang
konstant sind, spiegelt sich die Rotationssymmetrie der Anordnung auch in den
Feldgrößen. Man erhält dann die Feldkoordinaten  und
und  .
.
Beispiel Spannung im Wirbelfeld
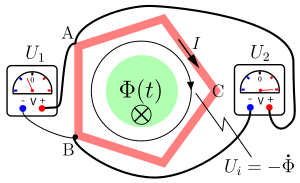
Die Anordnung rechts illustriert auf Basis der Flussregel, dass die an einer (mit einem zeitveränderlichen Magnetfeld verketteten) Leiterschleife abgegriffene Spannung von der Platzierung der Messleitungen abhängt. Die Spannung zwischen zwei Punkten ist dann kein eindeutiger Begriff mehr.
In dem Messaufbau kontaktieren zwei gleich gepolte Spannungsmesser die Punkte
A und B eines leitenden Rahmens in der Form eines regelmäßigen Fünfecks. Sein
ohmscher Widerstand beträgt  .
In der Leiterschleife treibt die induzierte Spannung
den Strom
.
In der Leiterschleife treibt die induzierte Spannung
den Strom  an. Mit dem Umlaufweg durch das Messgerät 1 und die Rahmenseite AB ist kein
Fluss verkettet. Der Spannungsmesser 1 zeigt entsprechend der
Spannungsgleichung
an. Mit dem Umlaufweg durch das Messgerät 1 und die Rahmenseite AB ist kein
Fluss verkettet. Der Spannungsmesser 1 zeigt entsprechend der
Spannungsgleichung  den Wert
den Wert  an. Mit dem alternativen Umlauf A–C–B–Voltmeter1 zur Berechnung von
an. Mit dem alternativen Umlauf A–C–B–Voltmeter1 zur Berechnung von  ist der zeitveränderliche magnetische Fluss
ist der zeitveränderliche magnetische Fluss  verkettet, sodass die Spannungsgleichung
verkettet, sodass die Spannungsgleichung  gilt. Daraus folgt mit
gilt. Daraus folgt mit  wieder .
wieder .
Für den Spannungsmesser 2 gelten entsprechende Gleichungen: Jene ohne
verketteten Fluss entlang A–Voltmeter2–B–C–A lautet  .
Der alternative Umlauf A–Voltmeter2–B–A mit der Spannungsgleichung
.
Der alternative Umlauf A–Voltmeter2–B–A mit der Spannungsgleichung  ist mit dem Fluss
verkettet. Aus beiden Umläufen errechnet man
ist mit dem Fluss
verkettet. Aus beiden Umläufen errechnet man  .
.
Der kein Rahmenteil durchlaufende (Vergleichs-)Umlauf nur über die beiden
Spannungsmesser liefert die Gleichung  ,
die mit den oben angegebenen Termen für
und
,
die mit den oben angegebenen Termen für
und  erfüllt ist.
erfüllt ist.
Selbstinduktion
Literatur
- Karl Küpfmüller, Gerhard Kohn: Theoretische Elektrotechnik und Elektronik. 14. Auflage. Springer, 1993, ISBN 3-540-56500-0.
- Adolf J. Schwab: Begriffswelt der Feldtheorie. Elektromagnetische Felder, Maxwell-Gleichungen, Gradient, Rotation, Divergenz. 6. Auflage. Springer, 2002, ISBN 3-540-42018-5.
- Heinrich Frohne, Karl-Heinz Löcherer, Hans Müller, Thomas Marienhausen, Dieter Schwarzenau: Moeller Grundlagen der Elektrotechnik (Studium). 22. Auflage. Vieweg + Teubner Verlag, Springer Fachmedien, Berlin/ Offenbach 2011, ISBN 978-3-8348-0898-1.
Anmerkungen
- ↑ Die Kontroverse lässt sich auflösen, wenn man die Geschwindigkeiten konsequent auf das zugrundegelegte Bezugssystem bezieht, die Lorentztransformation für die mechanischen und elektromagnetischen Feldgrößen berücksichtigt und zudem eine ggf. vorhandene Geschwindigkeit des Voltmeters mit in die Überlegungen einbezieht.
- ↑
Bei der Darstellung des Induktionsgesetzes in
integraler Form am Artikelbeginn sind einer üblichen Konvention der Mathematik
folgend die Umlaufrichtungen der Randlinie
und die zugehörige Fläche
rechtshändig zueinander orientiert. Es ergibt sich dann ein negatives
Vorzeichen im Induktionsgesetz.
- ↑ R. Kröger, R. Unbehauen: Zur Theorie der Bewegungsinduktion. Mitteilung des Lehrstuhls für Allgemeine und Theoretische Elektrotechnik, Universität Erlangen-Nürnberg, AEÜ, Band 36, Heft 9, 1982. Die Autoren erklären: „Umgekehrt gelten insbesondere die Gl. (17a, b) (das sind das Induktionsgesetz in differentieller Form und das vorgenannte Induktionsgesetz in Integralform, Anm.) entgegen allen anders lautenden Behauptungen auch für bewegte Leiter (allgemein für bewegte Medien).“
- ↑
H. Flanders: Differentiation under the
integral sign. In: American Mathematical Monthly. 80 (6), Juni–Juli
1973, S. 615–627:
 (Nichtexistenz von magnetischen Monopolen) ist der letzte Term im Zusammenhang
mit -Feldern
gleich null und kann damit entfallen.
(Nichtexistenz von magnetischen Monopolen) ist der letzte Term im Zusammenhang
mit -Feldern
gleich null und kann damit entfallen. - ↑ Hier ist auch die in diesem Artikel bereits genannte Analogie mit einer Batterie nützlich: Im Zusammenhang mit Batterien spricht man statt von elektrischen Feldern von sog. elektromotorischen Kräften, und es tritt auch hier das bereits angesprochene Vorzeichenproblem auf (der elektrische Strom ist parallel, nicht antiparallel zu diesen Kräften).
- ↑
R. Kröger, R. Unbehauen: Zur Theorie der
Bewegungsinduktion. Mitteilung des Lehrstuhls für Allgemeine und
Theoretische Elektrotechnik, Universität Erlangen-Nürnberg, AEÜ, Band 36,
Heft 9, 1982. Die Autoren kritisieren, dass die Bedeutung des Buchstaben
für die elektrische Feldstärke dadurch inkonsistent verwendet wird und
bekräftigen, dass die im Ruhesystem beobachtete magnetische Kraft nicht auf
eine elektrische Feldstärke (gemessen im Ruhesystem) zurückgeführt werden
kann. Wörtlich heißt es: „Die Größe
 ist also im Laborsystem keine legitime elektrische Feldstärke. Sie hätte als
solche in der Situation von Bild 1 auch eine seltsame stets übersehene
Eigenschaft, nämlich Quellen bei negativen und Senken bei positiven Ladungen!
Man kann eben nicht alles, was die Dimension der elektrischen Feldstärke hat,
als solche bezeichnen. Es sei denn, man verzichtet darauf, überall in
der Elektrodynamik unter ‚E‘ das gleiche zu verstehen.“
ist also im Laborsystem keine legitime elektrische Feldstärke. Sie hätte als
solche in der Situation von Bild 1 auch eine seltsame stets übersehene
Eigenschaft, nämlich Quellen bei negativen und Senken bei positiven Ladungen!
Man kann eben nicht alles, was die Dimension der elektrischen Feldstärke hat,
als solche bezeichnen. Es sei denn, man verzichtet darauf, überall in
der Elektrodynamik unter ‚E‘ das gleiche zu verstehen.“ - ↑ Bei der Bildung der zeitlichen Ableitung des magnetischen Flusses ist darauf zu achten, dass sich der Flächenrand (d.h. die Umlaufkurve) überall nach Maßgabe der konvektiven Randelemente verschiebt.
- ↑
wurde früher als elektromotorische Kraft (EMK) bezeichnet. Im
angelsächsischen Raum, z.B. bei R. P. Feynman (s.o.)
heißt die induzierte Spannung „(induced) electromotive force (EMF
 )“.
)“.



© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.05. 2024