Hubkolbenmotor
In einem Hubkolbenmotor führt die Expansion eines Gases über eine Schubkurbel dazu, dass mechanische Energie abgegeben bzw. Arbeit verrichtet wird. Hubkolbenmotoren zählen zu den Kolbenmaschinen.
Funktionsprinzip
Die Ausdehnung des Gases in einem Zylinder verrichtet Arbeit an einem Kolben, die durch eine Pleuelstange auf die Kurbelwelle übertragen wird. So wird die oszillierende Bewegung des Kolbens in eine Drehbewegung umgesetzt, und die Kolben können Arbeit über die Pleuel an die Kurbelwelle abgeben (Abb. 1). Zwei Bauformen sind bekannt:
- Beim Standmotor ist das Motorgehäuse mit den Zylindern fixiert und die Kurbelwelle dreht sich. Diese Bauform ist heute die Regel.
- Beim Umlaufmotor dreht sich das Motorgehäuse um die Kurbelwelle. Sie kann stillstehen oder sich ebenfalls drehen, wobei sie mit dem Motorgehäuse über Zahnräder gekoppelt ist, zum Beispiel beim Megola-Motorrad. Die Zylinder kreisen um die Kurbelwellenachse. Die Hubzapfen sind exzentrisch angeordnet, wodurch der Hub der einzelnen Kolben in den Zylindern zustande kommt, genau wie beim Standmotor. Frühe Flugmotoren waren häufig Stern-Umlaufmotoren.
Betrachtet man nur die Bewegung der Teile relativ zueinander, unterscheiden sich die beiden Bauformen nicht. Die Zylinder eines Sternmotors sind drehsymmetrisch um die Kurbelwelle angeordnet, wodurch Unwucht vermieden wird. Ihre Anzahl ist bei Viertaktmotoren meist ungerade, damit die Zündungen in gleichmäßigen Abständen erfolgen.
Beispiele für Hubkolbenmotoren sind:
- Verbrennungsmotoren mit innerer Verbrennung, speziell Dieselmotor und Ottomotor
- Verbrennungsmotoren mit äußerer Verbrennung und
- geschlossenem Kreislauf des Arbeitsfluids, wie Stirlingmotoren oder Dampfmotoren
- offenem Kreislauf des Arbeitsfluids, wie Dampfmaschinen
- Gasexpansionsmotoren
Hubkolbenmotoren werden auch nach der Zahl und Anordnung der Kolben je Brennraum eingeteilt:
- normaler Hubkolbenmotor mit einem Kolben je Brennraum (bei weitem am häufigsten)
- Doppelkolbenmotor mit zwei Kolben in parallelen Zylindern, mit gemeinsamem Brennraum und gekoppelter Hubbewegung
- Gegenkolbenmotor mit zwei gegeneinander arbeitenden Kolben und gekoppelter Hubbewegung im gleichen Zylinder
Sie werden auch nach der Zahl und Anordnung der Zylinder eingeteilt:
- Reihenmotor
- V-Motor
- Boxermotor
- Sternmotor
- W-Motor (und weitere)
Begriffe und Bezeichnungen
- Der Kurbeltrieb oder das Triebwerk (umgangssprachlich) wandelt die Kraft der Gasexpansion in eine oszillierende Bewegung des Kolbens und dann in eine rotierende Bewegung der Kurbelwelle um und steuert den Ablauf des Gasaustauschprozesses, sowie ggf. weitere synchrone Vorgänge. Weitere Komponenten des Kurbeltriebs sind Kolbenringe, Kolbenbolzen, Pleuel und Kurbelwelle.
- Im Zylinder gleitet der Kolben auf und ab. Zwischen Kolben und Zylinder dichten die Kolbenringe den Expansionsraum so ab, dass die Gasladung nicht am Kolben vorbei expandieren kann.
- Der Kolben bildet im Expansionsraum eine bewegliche Wand. Durch die Bewegung wird die Expansion des Gases in mechanische Arbeit umgewandelt. Daneben kann der Kolben in manchen Bauformen (speziell Zweitaktmotoren) den Gaswechsel (bei innerer Verbrennung auch als Ladungswechsel bezeichnet) steuern.
- In den Totpunkten kehrt der Kolben seine Bewegung um. Der obere Totpunkt (OT) ist erreicht, wenn der Expansionsraum das kleinste Volumen hat, welches bei Verbrennungsmotoren auch als Kompressionsvolumen (VC) bezeichnet wird. Der untere Totpunkt (UT) ist erreicht, wenn der Expansionsraum sein größtes Volumen erreicht.
- Der Hubraum (VH) ist die Differenz zwischen dem Zylindervolumen im UT und im OT.
- Beim Verbrennungsmotor wird das Verhältnis von Kompressionsvolumen und maximalem Brennraumvolumen, also ε = 1+ VH/VC als geometrisches Verdichtungsverhältnis (ε) bezeichnet. Es wird meist als 1:ε angegeben.
- Die Bauform beschreibt die Anordnung der Zylinder bei Motoren mit mehr als einem Zylinder. Häufig verwendete Bauformen sind Reihenmotor, V-Motor, Boxermotor und gelegentlich der W-Motor. Stern-, Doppelkolben- und Gegenkolbenmotoren sind heute fast nur noch im Modellbau anzutreffen.
- Massenkräfte entstehen durch die Bewegung des Kurbeltriebs an jedem Zylinder. Ursache ist die oszillierende Bewegung des Kolbens, die rotierende Bewegung der Kurbelwelle und die komplexe Überlagerung beider Anteile in der Bewegung des Pleuels.
- Durch den Ausgleich von Massenkräften können die Vibrationen des Motors reduziert werden. Ein einfacher Ausgleich lässt sich durch Ausgleichswellen erreichen. Ausgleichswellen drehen mit der Kurbelwellendrehzahl oder der doppelten Kurbelwellendrehzahl (Beispiel Lanchester-Ausgleich). Daneben werden auch komplexere Systeme wie Ausgleichspleuel (beispielsweise BMW F800) verwendet.
- Massenmomente entstehen um den Schwerpunkt des Motors durch das Zusammenwirken mehrerer Zylinder durch die Bewegung der einzelnen Kolben, wenn beispielsweise ein Kolben aufwärts und der andere gleichzeitig abwärts geht. Durch geeignete Anzahl und Anordnung der Zylinder können Massenmomente eliminiert werden.
- Der Kurbelwinkel wird zwischen der Zylinderlängsachse und dem Hubzapfen der Kurbelwelle gemessen und in Richtung der Kurbelwellendrehung gezählt. Beim Ottomotor wird der Zündzeitpunkt (Zündwinkel) auf den Kurbelwinkel bezogen, negative Winkel werden häufig als „φ Grad vor OT“ angegeben. Die Zählung wird beim Viertakt-Motor gelegentlich über alle Arbeitstakte fortgesetzt, so dass der Kurbelwinkel zwischen 0 und 720° liegen kann.
- Drehschwingungen entstehen durch die periodische Anregung der Gaskräfte und erzeugen einen ungleichmäßiges Abtriebsdrehmoment an Kurbelwelle und ggf. einer Kupplung.
- Die Zündfolge eines Verbrennungsmotors (auch bei Dieselmotoren so bezeichnet) gibt die Reihenfolge der Verbrennungen bei Mehrzylindermotoren an. In der Regel wird darauf geachtet, dass die Zündungen bezogen auf den Drehwinkel der Kurbelwelle in gleichen Abständen erfolgen, um Drehschwingungen zu reduzieren.
- Das Schwungrad dient ebenfalls zur Begrenzung der Drehschwingungen und als Zwischenspeicher für die Energie, insbesondere beim Verbrennungsmotor, bei dem während der Kompressionsphase Energie für die Verdichtung eines Zylinders bereitgestellt werden muss.
- Der Gaswechsel wird durch Ventile (Viertakt- und einige Zweitakt-Großmotoren), Drehschieber (Zweitakter, selten Viertakter), Lamellen- oder Schnüffelventile (Zweitakter) oder Schlitze (vor allem Zweitakt- und Wankelmotoren) gesteuert.
Massenkräfte
Infolge der Hubbewegung der Kolben und Pleuel sowie infolge des ungleichförmigen Übertragungsverhaltens des Kurbeltriebs treten Massenkräfte auf, die sich in den Motorlagern abstützen und benachbarte Strukturen zu Schwingungen anregen.
Die Massenkräfte der linear bewegten Teile des Kurbeltriebes (oszillierende Massen) lassen sich durch folgende Formel näherungsweise berechnen:

mit

 :
Oszillierende Massenkraft
:
Oszillierende Massenkraft :
Oszillierende Masse
:
Oszillierende Masse :
Kurbelradius
:
Kurbelradius :
Winkelgeschwindigkeit der Kurbelwelle
:
Winkelgeschwindigkeit der Kurbelwelle :
Kurbelwinkel
:
Kurbelwinkel :
Pleuellänge
:
Pleuellänge :
Zeit seit Durchlaufen des oberen Totpunktes
:
Zeit seit Durchlaufen des oberen Totpunktes
Da es sich bei dem Ausdruck in der Klammer um die ersten zwei Glieder einer
Reihenentwicklung
handelt, bezeichnet man  als Massenkraft 1. Ordnung,
als Massenkraft 1. Ordnung,  als Massenkraft 2. Ordnung.
als Massenkraft 2. Ordnung.
Theoretisch treten nicht nur 1. und 2. Ordnung auf, sondern unendlich viele ganzzahlige Ordnungen, die jedoch ab der 4. Ordnung aufgrund ihrer geringen Größe meistens vernachlässigbar sind.
Massenausgleich
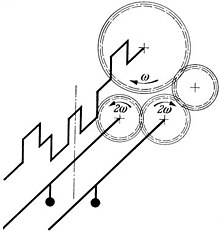
Die rotierenden Massen des Kurbeltriebs können durch Gegengewichte an der Kurbelwelle ausgeglichen werden. Oszillierende Massenkräfte 1. und 2. Ordnung können bei Mehrzylindermotoren durch eine geschickte Anordnung der Zylinder vermieden oder vermindert werden. Um diese Massenkräfte völlig auszugleichen, benötigt man mindestens sechs Zylinder beim Viertakt-Reihenmotor oder acht Zylinder beim V-Motor. Bei Motoren mit weniger Zylindern kommen oft Ausgleichswellen zum Einsatz, auf denen entsprechende Ausgleichsunwuchten mit einfacher oder doppelter Kurbelwellen-Drehzahl umlaufen (zum Beispiel Lanchester-Ausgleich (Abb. 2)).
Eine andere Möglichkeit, einen perfekten Massenausgleich zu erreichen (und zwar nicht nur näherungsweise), besteht in der Verwendung von zwei gegenläufig rotierenden Kurbelwellen, wie zum Beispiel beim H-Motor.
Tabelle
| Zylinderzahl | Freie Kräfte (1. Ordnung) |
Freie Kräfte (2. Ordnung) |
Freie Momente (1. Ordnung) |
Freie Momente (2. Ordnung) |
Zündabstände bei Viertaktmotoren |
|---|---|---|---|---|---|
| 1 | 2 | 3 | - | - | 720° |
| 2 Reihe (180°) | 0 | 2 | 2 | 0 | 180°/540° |
| 2 Twin (360°) | 2 | 3 | 0 | 0 | 360° |
| 2 (V 90°) | 1 | 3 | - | - | 270°/450° |
| 2 (V 60°) | 2 | 3 | - | - | 300°/420° |
| 2 (Boxer) | 0 | 0 | 2 | 3 | 360° |
| 3 (Reihe 120°) | 0 | 0 | 2 | 3 | 240° |
| 4 (Reihe) | 0 | 3 | 0 | 0 | 180°/180° oder 270°/90° |
| 4 (V 90°)1 | 0 | 3 | 2 | 0 | 90°/270° |
| 4 (Boxer 180°) | 0 | 0 | 0 | 2 | 180°/180° |
| 5 (Reihe) | 0 | 0 | 2 | 2 | 144°/144° |
| 6 (Reihe) | 0 | 0 | 0 | 0 | 120°/120° |
| 6 (V 90°)1 | 0 | 0 | 3 | 3 | 150°/90° oder 120°/120° (um 30° versetzte Hubzapfen) |
| 6 (V 60°)1 | 0 | 0 | 3 | 3 | 120°/120° (um 60° versetzte Hubzapfen) |
| 6 (Boxer 120°) | 0 | 0 | 1 | 2 | 120°/120° |
| 8 (V 90°) | 0 | 0 | 1 | 0 | 90°/90°/ |
| 12 (V 60°) | 0 | 0 | 0 | 0 | 60°/60° |
Legende: 0 = voll ausgeglichen 1 = voll auszuwuchten 2 = teilweise auszuwuchten 3 = nicht auszuwuchten
Ungleichförmige Bewegungsabläufe
Drehungleichförmigkeit
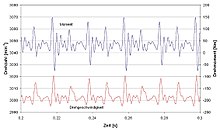
Da Hubkolbenmotoren nicht wie etwa Turbinen kontinuierlich laufen, sondern einen in verschiedene Takte aufgeteilten Prozess durchlaufen, kommt es an der Kurbelwelle zu einer Drehzahl- und Momentenpulsation, die um einen stationären Mittelwert schwankt (Abb. 3).
Die Form der Drehunförmigkeit wird bestimmt durch die Anzahl der Zylinder, den Druckverlauf im Zylinder, die Geometrie und die Massen der Motorbauteile sowie das Arbeitsverfahren (z. B. Zweitakt- bzw. Viertaktverfahren) sowie den Betriebspunkt (Last/Drehzahl) des Motors. Der Nebenantrieb z. B. einer Nockenwelle und der Sekundärantrieb von Nebenaggregaten können ebenfalls einen Einfluss haben.
Diese sogenannte Drehungleichförmigkeit ist die Ursache für Torsions-Schwingungen im nachgeschalteten Antriebsstrang, die häufig auch zu unangenehmen Motorgeräuschen führen. Um diese zu reduzieren, kommen Zweimassenschwungräder oder Torsionsschwingungs-Tilger beziehungsweise -Dämpfer zum Einsatz. Auch ein Wandlergetriebe dämpft die Stöße.
Kolbenhub und Verdichtung
Durch die Knickpleueltechnik und andere Methoden, einen variablen Kurbeltrieb zu erreichen, sollen unter anderem Verdichtungsverhältnis und -verlauf gesteuert werden.
Literatur
- Richard van Basshuysen; Fred Schäfer: Handbuch Verbrennungsmotor Grundlagen, Komponenten, Systeme, Perspektiven. Wiesbaden: Vieweg, 3. Auflage 2005, ISBN 3-528-23933-6.
- Eduard Köhler: Verbrennungsmotoren. Motormechanik, Berechnung und Auslegung des Hubkolbenmotors. Wiesbaden: Vieweg, 3. Auflage 2002, ISBN 3-528-23108-4.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 24.04. 2023