Pulskompressionsverfahren
Das Pulskompressionsverfahren ist ein Ortungsverfahren mit Anwendung in der Radartechnik und Sonar. Es werden dabei sonst eingesetzte sehr kurze und leistungsstarke Sendeimpulse durch längere, modulierte und in der Leistung reduzierte Sendeimpulse ersetzt. Mithilfe der Modulation, beispielsweise als Chirp oder bei digitalen Verfahren in Form von Pseudo-Rauschen, kann so auch mit dem zeitlich gedehnten und in der Leistung reduzierten Sendeimpuls mittels einer Korrelation im Empfänger die gleiche Auflösung wie mit den sehr kurzen und leistungsstarken Sendeimpulsen erreicht werden.
Arbeitsweise des klassischen Radars
Beim Impulsradar ohne Pulskompression werden extrem kurze Impulse mit Leistungen im Megawattbereich ausgesendet. Mit steigender Impulsleistung können größere Reichweiten erzielt werden, weil nur so das reflektierte, sehr schwache Signal nicht durch das Eigenrauschen des Empfängers überdeckt wird. Je kürzer die Dauer der Sendeimpulse, desto besser ist das Entfernungsauflösungsvermögen und unterschiedliche Objekte fast gleicher Entfernung lassen sich getrennt darstellen. In der Praxis bedeutet das hohe Impulsleistungen bei einer Sendedauer von wenigen Mikrosekunden, was hohe Anforderungen an die jeweiligen Senderöhren stellt.
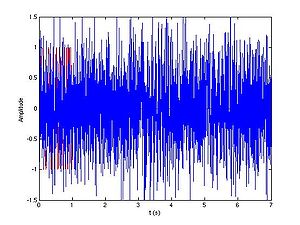
Zur Veranschaulichung des Auflösungsvermögens ist in den folgenden Bildern das Sendesignal in roter Farbe am linken Bildrand gezeigt, die Echos zweier Ziele sind in blauer Farbe dargestellt. Bei den beiden linken Bildern wurde der Rauschhintergrund (Eigenrauschen des Empfängers) weggelassen, der fast so groß wie die schwachen Empfangssignale wäre. Da der Amplitudenverlauf des Sendesignals bekannt ist, kann das Signal-Rausch-Verhältnis durch ein angepasstes Optimalfilter (Matched Filter) erheblich verbessert werden. Als Folge erhält die ursprünglich rechteckige Hüllkurve eine dreieckige Form, weshalb es schwierig wird, Ziele ähnlicher Entfernung zu trennen.
| Empfangssignal vor dem Optimalfilter, wenn es kein Empfängerrauschen gäbe |
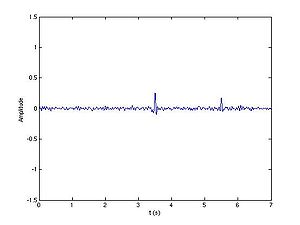
gefiltertes Signal am Ausgang des Empfängers. Der Sendeimpuls ist ausgeblendet |
|---|---|
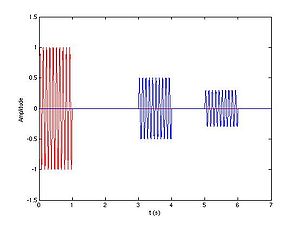
Wenn der Abstand der beiden Ziele groß genug ist... |
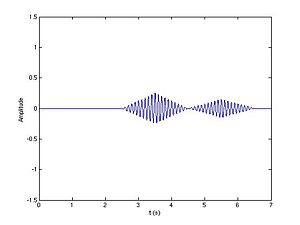
...können die Echos getrennt werden. |
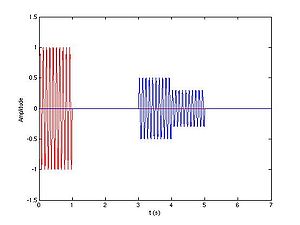
Wenn der Abstand zu gering ist... |
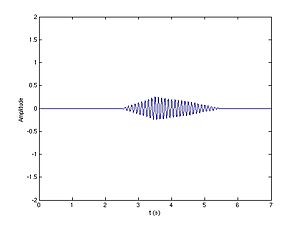
...verschmelzen die beiden Echos. |
Arbeitsweise eines Radars mit Pulskompression
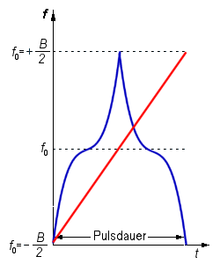
Mit dem Einsatz von Verstärkermodulen in Halbleitertechnik können hohe Impulsleistungen nicht oder nur sehr schwer erreicht werden. Bei der Pulskompression werden deutlich längere Sendeimpulse generiert, deren Frequenz innerhalb der Sendeimpulsdauer gezielt geändert wird. Diese Frequenzmodulation ermöglicht einen Zeitbezug innerhalb des Sendeimpulses, ähnlich wie es bei frequenzmodulierten Dauerstrichradargeräten (FMCW-Radar) durchgeführt wird. Der zeitliche Verlauf der Frequenzänderung kann linear oder nicht-linearer bei analogen Geräten mit spannungsgesteuerten Oszillatoren gesteuert werden, bei digitalen Geräten wird auch codierte Puls-Phasenmodulation eingesetzt.
Die erhebliche Verlängerung der Dauer der Sendeimpulse hätte katastrophale Auswirkungen auf das Auflösungsvermögens des Radargerätes, wenn es keine Möglichkeit gäbe, die relativ lange Impulsdauer von einigen Mikrosekunden erheblich zu verkürzen (zu komprimieren), damit die Laufzeit des Radarsignals exakt gemessen werden kann. Dafür wurden spezielle Pulskompressionsfilter entwickelt: Akustische-Oberflächenwellen-Filter mit spezieller Anordnung der „Finger“ als Hardware-Lösung und bei digitalen Geräten als FIR-Filter realisiert.
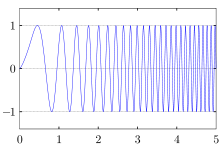
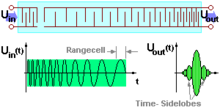
Die folgenden Bilder zeigen die Modulation mit einem Chirp und die Signalverbesserung durch das auf den Sendeimpuls angepasst Kompressionsfilter (Matched-Filter):
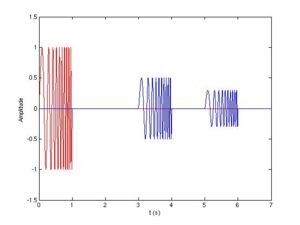
Empfangssignal vor dem Pulskompressionsfilter, wenn es kein Empfängerrauschen gäbe |
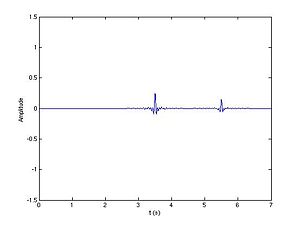
Signal am Ausgang des Pulskompressionsfilters Die Zeitachse ist um die Filterlaufzeit korrigiert |
Vor- und Nachteile der Pulskompression
- Das Impulsmaximum durch die Korrelation mit der Übertragungsfunktion des Kompressfilters ist zeitlich scharf begrenzt und lässt damit eine hohe räumliche Auflösung zu.
- Es können Reflexionen an unterschiedlichen Objekten im Empfänger getrennt und unterschieden werden, deren Abstand geringer ist, als es die Dauer der Sendeimpulse erlauben würde.
- Die Verringerung der Impulsleistung hat den für Luftraumaufklärungsradargeräte wesentlichen Vorteil, dass eine gegnerische Aufklärung des Radars erschwert wird und oft nur dann möglich ist, wenn das genaue Abbild der Modulation dem aufklärenden System bekannt ist. Deswegen wird oft von „Silent-Radar“, also von einem „stillen Radar“ gesprochen.
- Da das Rauschen immer breitbandig und der frequenzsynchrone Anteil des Rauschens im Vergleich zum Echosignal infolge der statistischen Verteilung eher gering ist, verringert diese Art der Filterung den Anteil des Rauschens derart, dass auch dann noch ein klares Ausgangssignal erzielt wird, wenn das Eingangssignal so klein ist, dass es bei einem klassischen Radar schon längst im Rauschen untergeht und für eine einfache Demodulation somit verloren ist.
- Der Radarempfänger wird bei Pulskompression und geeigneter Wahl von
Impulsdauer
 und Frequenzhub
und Frequenzhub  erheblich empfindlicher, die Leistung des Empfangssignals erscheint um den
Faktor
erheblich empfindlicher, die Leistung des Empfangssignals erscheint um den
Faktor  (meist im Bereich 20 bis 30) verstärkt.
(meist im Bereich 20 bis 30) verstärkt.
In den folgenden Bildern wird gezeigt, wie das Empfangssignal vor dem Pulskompressionsfilter durch ein starkes Zusatzrauschen gestört wird und wie unbedeutend dieses Rauschen nach dem Pulskompressionsfilter noch ist.
Empfangssignal + Zusatzrauschen vor … |
… und nach dem
Pulskompressionsfilter |
Wesentlicher Nachteil der Pulskompressionsmethode ist die Verschlechterung der minimal möglichen Entfernung, denn solange gesendet wird, kann nichts empfangen werden („Tote Zone“). Für die Dauer des zeitlich gestreckten Sendeimpulses ist der Empfänger abgeschaltet, das Radar also „blind“. Da dies gerade für Flugsicherungsradargeräte ein Nachteil ist, arbeiten diese meist abwechselnd mit beiden Methoden. Zwischen den frequenzmodulierten Impulsen für große Reichweite werden kleine und sehr kurze Impulse ausgesendet, die nur den Nahbereich abdecken müssen und deshalb keine große Impulsleistung benötigen.
Beispiel einer Radaranwendung
Als Beispiel einer technischen Realisierung sollen folgende Daten des amerikanischen Radars Cobra Dane dienen: Die Sendefrequenz wird innerhalb der Dauer eines Sendeimpulses (1000 µs) mit der Änderungsgeschwindigkeit 0,2 MHz/µs (up-chirp) von der Startfrequenz 1175 MHz bis auf 1375 MHz gesteigert. Als Referenz dazu wird die Oszillatorfrequenz des Überlagerungsempfängers von 1665 MHz auf 1865 MHz geändert und wird mit dem empfangenen Signal korreliert, weshalb eintreffende Empfangssignale auf die Zwischenfrequenz 490 MHz herunter gemischt werden. Nach einer weiteren Reduktion auf 60 MHz und Verstärkung erfolgt die Abtastung durch zwei Analog-Digital-Umsetzer, um für das I&Q-Verfahren die notwendigen Basisbandsignale bereitzustellen. Die weitere Verarbeitung erfolgt durch digitale Signalverarbeitung.
Technische Details zur Frequenzmodulation
Lineare Frequenzmodulation
Bei dieser Pulskompressionsmethode wird der Sendeimpuls linear frequenzmoduliert. Das hat den Vorteil, dass die Schaltung noch relativ einfach gehalten werden kann. Dabei wird der Sendeimpuls in eine Anzahl Zeitintervalle mit angenommen konstanter Frequenz eingeteilt. Spezielle Filter für genau die Frequenz in dem jeweiligen Zeitintervall ergeben je ein Ausgangssignal, das in einer Kaskade aus Verzögerungsleitungen und Summierstufen zu einem Ausgangsimpuls addiert wird.
Die lineare Frequenzmodulation hat den Nachteil, dass durch sogenannte „Sweeper“ relativ leicht Störungen erzeugt werden können. Als Beispiel für eine Anwendung der linearen Frequenzmodulation kann das RRP 117 genannt werden. Der Nachteil der Störanfälligkeit wird durch das Aussenden von zwei verschiedenen Trägerfrequenzen mit jeweils linearer Frequenzmodulation ausgeglichen.
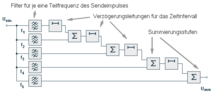
Im nebenstehenden Schaltungsbeispiel wird das Prinzip anhand von fünf im Sendeimpuls vorhandenen Frequenzen dargestellt. Der hohe Schaltungsaufwand ist mit der heutigen Integrationsmöglichkeit durchaus beherrschbar. Es gibt praktisch zwei prinzipielle Möglichkeiten, dieses Verfahren technisch zu realisieren:
- eine prozessorgesteuerte Datenverarbeitung (nach einer A/D-Wandlung)
- mit einem AOW-Filter
Akustische-Oberflächenwellen-Filter
AOW-Filter, auch SAW-Filter (englisch Surface Acoustic Wave) genannt, werden oft in Radarsystemen mit Pulskompression eingesetzt und komprimieren das frequenzmodulierte Echosignal auf analogem Wege. Sie arbeiten nach dem piezoelektrischen Prinzip.
Auf einem Piezokristall ist ein breitbandiger Wandler aufgedampft, der die elektrischen Schwingungen in mechanische Schwingungen im Kristall umwandelt. Diese mechanischen Schwingungen breiten sich jedoch mit sehr viel kleinerer Geschwindigkeit aus, als die elektrischen Signale auf einer Leitung. Deshalb werden relativ hohe Verzögerungszeiten erreicht. Ebenfalls auf dem gleichen Kristall werden frequenzabhängige Wandler aufgedampft, die die mechanische Energie wieder in elektrische Signale zurückwandeln.
Durch den zwangsläufig unterschiedlichen Abstand dieser verschiedenen Wandler zum Erregersystem erhalten die verschiedenen Frequenzanteile des Eingangssignals eine unterschiedliche zeitliche Verzögerung, so dass alle Frequenzanteile des Eingangssignals auf einen gleichen Zeitpunkt geschoben werden und somit vom Radargerät auf die gleiche Entfernung interpretiert werden. Die Summe der Verzögerung muss bei der Entfernungsberechnung berücksichtigt, also von der Gesamtlaufzeit abgezogen werden.
Time-Sidelobes
Da die frequenzabhängigen Wandler, wie jedes Filter, auch durch Oberwellen angeregt werden können, entstehen neben dem scharfen Ausgangsimpuls störende Nebenzipfel, sogenannte „Time-Sidelobes“, die oft durch aufwändige Verfahren kompensiert werden müssen.
Da sowohl der zeitliche, als auch der Amplitudenabstand konstant sind, können mit einer Wichtung der Signalamplituden diese Nebenzipfel auf einen akzeptablen Wert reduziert werden. Wenn diese Amplitudenwichtung nur auf dem Empfangsweg vorgenommen wird, verursacht sie aber auch eine Verschlechterung des Filters und verringert den Signal-Rausch-Abstand. Die Größe dieser Nebenzipfel sind ein wichtiges Qualitätskriterium beim Pulskompressionsverfahren und können durch diese Amplitudenwichtung auf einen Wert im Bereich von -30 dB abgesenkt werden.
Nicht-lineare Frequenzmodulation
Die Pulskompression mit nicht-linearer Frequenzmodulation weist einige deutliche Vorteile auf. So benötigt sie z.B. für die Unterdrückung der bei der Kompression entstehenden Time-Sidelobes keine Amplitudenwichtung mehr, da bereits durch die Form der Modulation die Funktion der sonst nötigen Amplitudenwichtung erfüllt wird. Somit wird ein Filterabgleich mit steileren Flanken möglich. Auf diese Art werden die sonst durch die Amplitudenwichtung auftretenden Verluste im Signal-Rausch-Verhältnis vermieden. Es gibt zwei Möglichkeiten der nicht-linearen Frequenzmodulation:
- eine symmetrische Form, und
- eine unsymmetrische Form.
Die symmetrische Form der Modulation hat während der ersten Hälfte der Sendeimpulsdauer eine aufsteigende (oder abfallende) Frequenzänderung und in der zweiten Hälfte eine fallende (oder aufsteigende) Frequenzänderung. Eine unsymmetrische Form der Modulation erhält man, wenn von der symmetrischen Form nur eine Hälfte verwendet wird.
Die Nachteile der Pulskompression mit nicht-linearer Frequenzmodulation sind:
- ein sehr komplizierterer Schaltungsaufbau und
- eine komplizierte Modulation, damit jeder Sendeimpuls die genau gleichen Eigenschaften bei der Amplitudenwichtung erhält.
Meist wird diese Art der Frequenzmodulation durch spezielle Waveform-Generatoren erzeugt, die eine prozessorgesteuerte Impulsform erzeugen.
Pulskompression mit Phasenmodulation
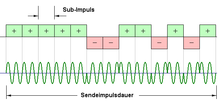
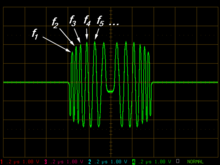
Die phasenkodierte Impulsform unterscheidet sich von der frequenzmodulierten Impulsform darin, dass der lange Gesamtimpuls in kleinere Sub-Impulse gleicher Frequenz unterteilt ist. Diese Sub-Impulse repräsentieren immer die kleinste auflösbare Entfernung. Diese Sub-Impulse haben alle die gleiche Länge und innerhalb dieser Impulsdauer ist die Phase konstant. Zwischen den Sub-Impulsen kann ein Phasensprung programmiert werden. Meist wird dieser Phasensprung mit einem binären Code verknüpft. Bei einer Anzahl von 13 Sub-Impulsen im Sendeimpuls (Barker-Code wie in dem nebenstehenden Bild gezeigt) haben die Time-Sidelobes eine Größe von −23 dB. (Dieses Impulsmuster wurde auch von dem Radargerät AN/TPS-43 verwendet.)
Der binäre Code besteht aus einer Folge von logischen Zuständen. In Abhängigkeit dieses binären Codes wird die Phasenlage des Sendesignals zwischen 0 und 180° umgeschaltet. Im Gegensatz zum gezeigten und stark vereinfachten Bild ist die Sendefrequenz nicht unbedingt ein Vielfaches der Frequenz der Schaltimpulse. Die codierte Sendefrequenz wird an den Phasenumkehrpunkten generell disharmonisch umgeschaltet.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.11. 2025