Abklingkonstante
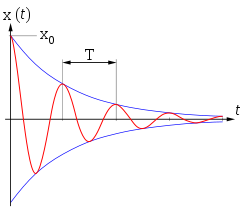  |
Darstellung des zeitlichen Verlaufs der Größe  bei einer freien gedämpften Schwingung. |
Die Abklingkonstante auch Abklingkoeffizient ist bei linearen Schwingungssystemen
mit einem Freiheitsgrad das Produkt aus ungedämpfter Eigenkreisfrequenz  und Lehrscher
Dämpfung
und Lehrscher
Dämpfung  .
.

Der Zeitverlauf einer linearen Schwingung kann durch die Gleichung:
 ,
mit
,
mit 
beschrieben werden. Bei positivem Vorzeichen der Abklingkonstanten klingt die Schwingung ab, bei negativem Vorzeichen nimmt die Amplitude der Schwingung exponentiell zu.
Bei einer gedämpften Schwingung ( )
ist die Amplitude etwa nach der Zeit
)
ist die Amplitude etwa nach der Zeit  auf unter 5 % der Ausgangsamplitude abgeklungen.
auf unter 5 % der Ausgangsamplitude abgeklungen.
Bei gemessenen Sprungantworten
beliebiger Schwingungssysteme kann die Abklingkonstante näherungsweise aus dem
logarithmischen
Dekrement  und der Schwingungsperiode
und der Schwingungsperiode
 berechnet werden.
berechnet werden.

Das logarithmische Dekrement berechnet sich aus zwei Amplituden, die um die Schwingungsdauer entfernt liegen. Bei linearen Systemen reichen zwei Amplituden aus. Bei schwach nichtlinearen Systemen sollte über mehrere logarithmische Dekremente gemittelt werden. Bei stark nichtlinearen System ist es besser die Zeit zu ermitteln bis die Amplitude in einen Streifen um ± 5 Prozent des Stationärwerts eingetreten ist.

Systeme mit PT1-Verhalten, z.B. die Hintereinanderschaltung einer Feder und eines Dämpfers werden durch die Differentialgleichung

beschrieben. Die Zeitkonstante  ist der Kehrwert der Abklingkonstanten.
ist der Kehrwert der Abklingkonstanten.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 06.01. 2024